

Portable 2-DOF wrist joint rehabilitation robot
A rehabilitation robot and degree-of-freedom technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of difficulty, high cost, and poor flexibility of upper limb rehabilitation robots, which is conducive to portability and home use, saves mechanical design space, Avoid the effect of space constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
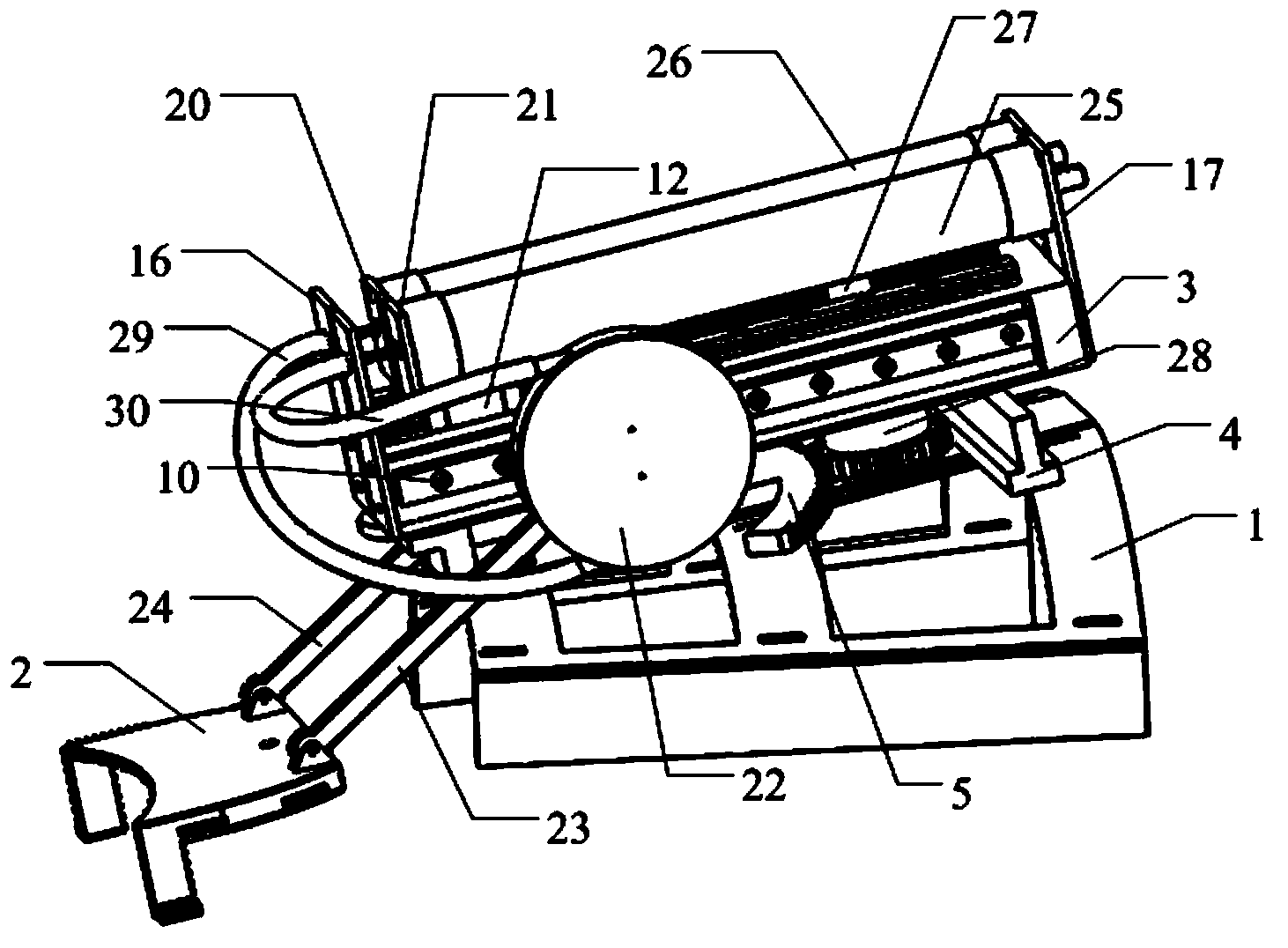
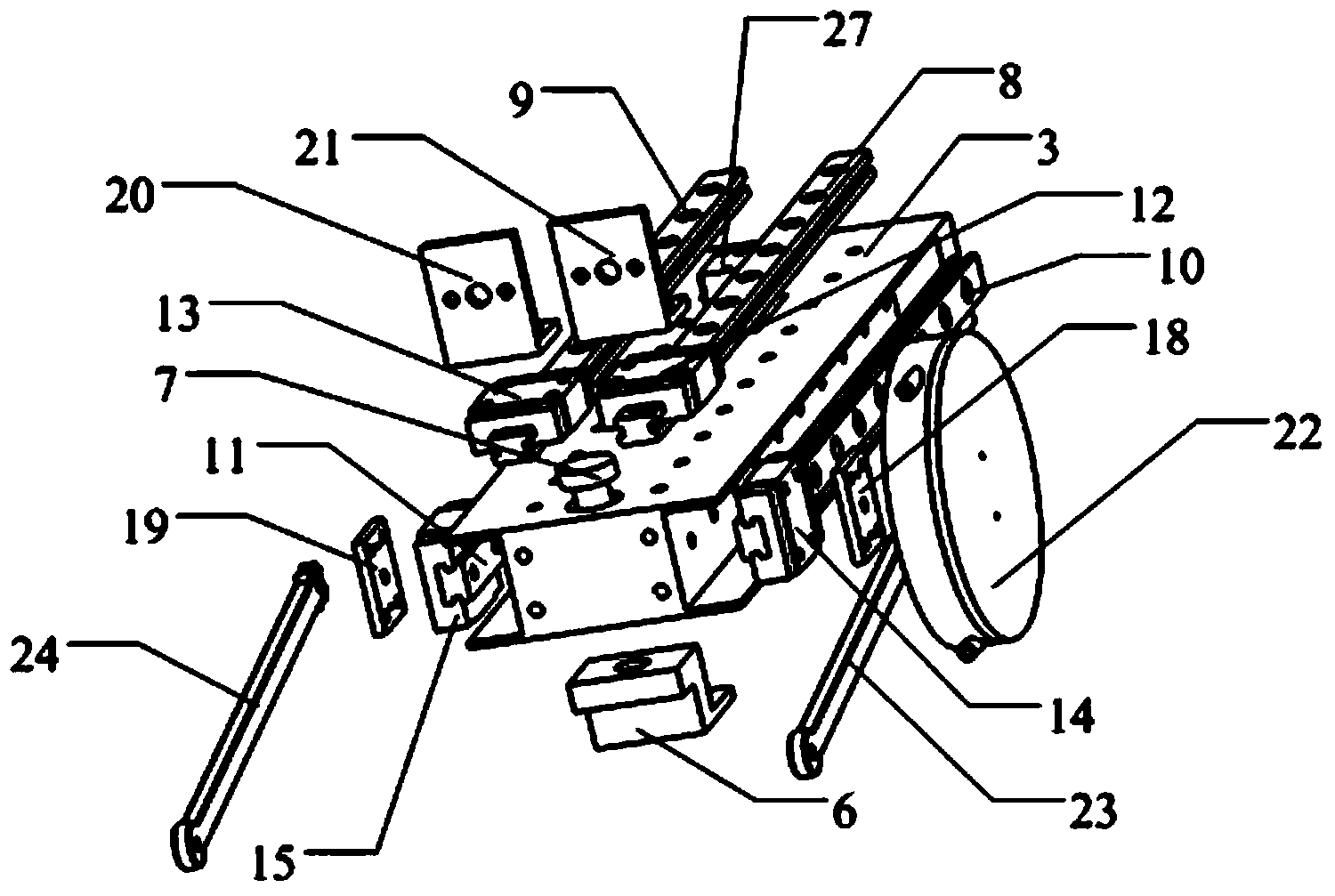
[0031] see figure 1 , 2 , figure 1 It is the overall structure diagram of the portable two-degree-of-freedom rehabilitation training robot according to the present invention, figure 2 It is an assembly schematic diagram of a sliding platform according to a preferred embodiment of the present invention. like figure 1 , 2 As shown in , a portable two-degree-of-freedom wrist joint rehabilitation robot includes an arm frame [1], a two-degree-of-freedom drive mechanism, and a hand back frame [2];
[0032] The arm frame [1] is worn on the outside of the forearm of the human body through the magic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More