

Posture determination method of star sensor
A technology of star sensor and determination method, which is applied in the direction of integrated navigator, etc., and can solve problems such as limited application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in detail below in conjunction with accompanying drawing:
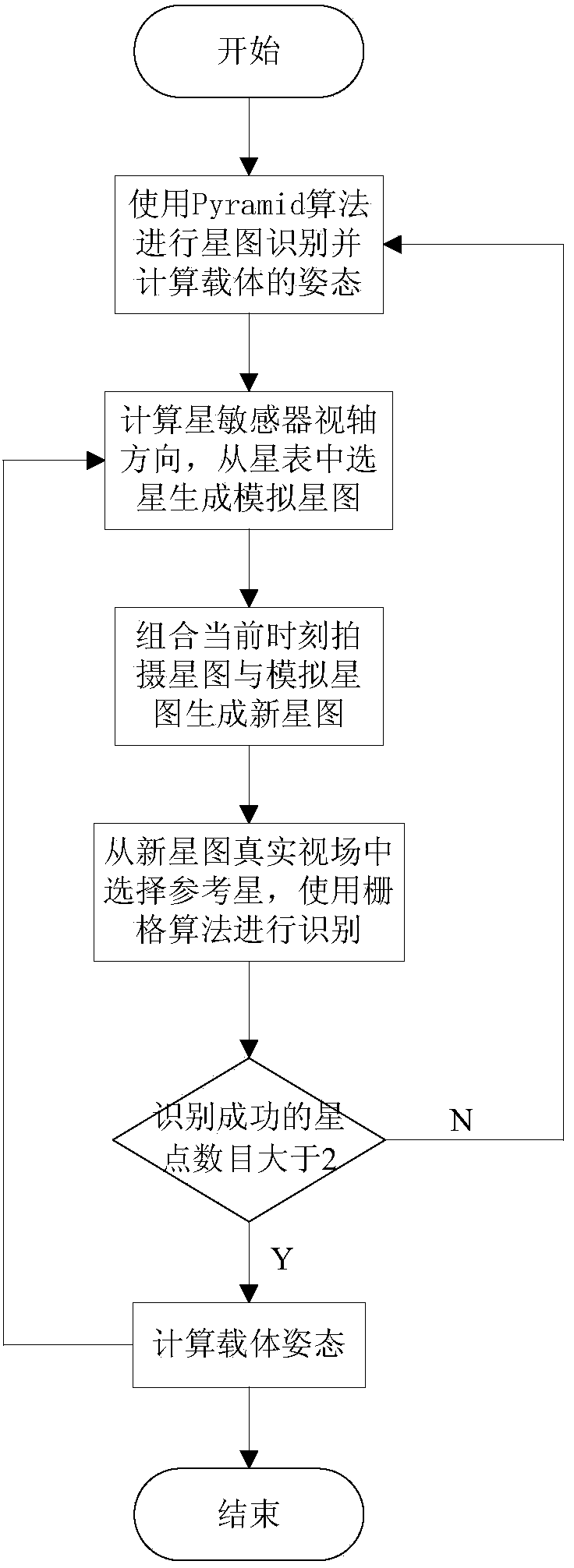
[0051] The present invention is a method for determining the attitude of a star sensor, comprising the following steps:
[0052] Step 1: Use the Pyramid algorithm to identify the star map at the initial moment and calculate the attitude of the carrier;
[0053] For the specific implementation of the Pyramid algorithm, please refer to the document "Lost-in-space Pyramid algorithm for robust star pattern recognition".
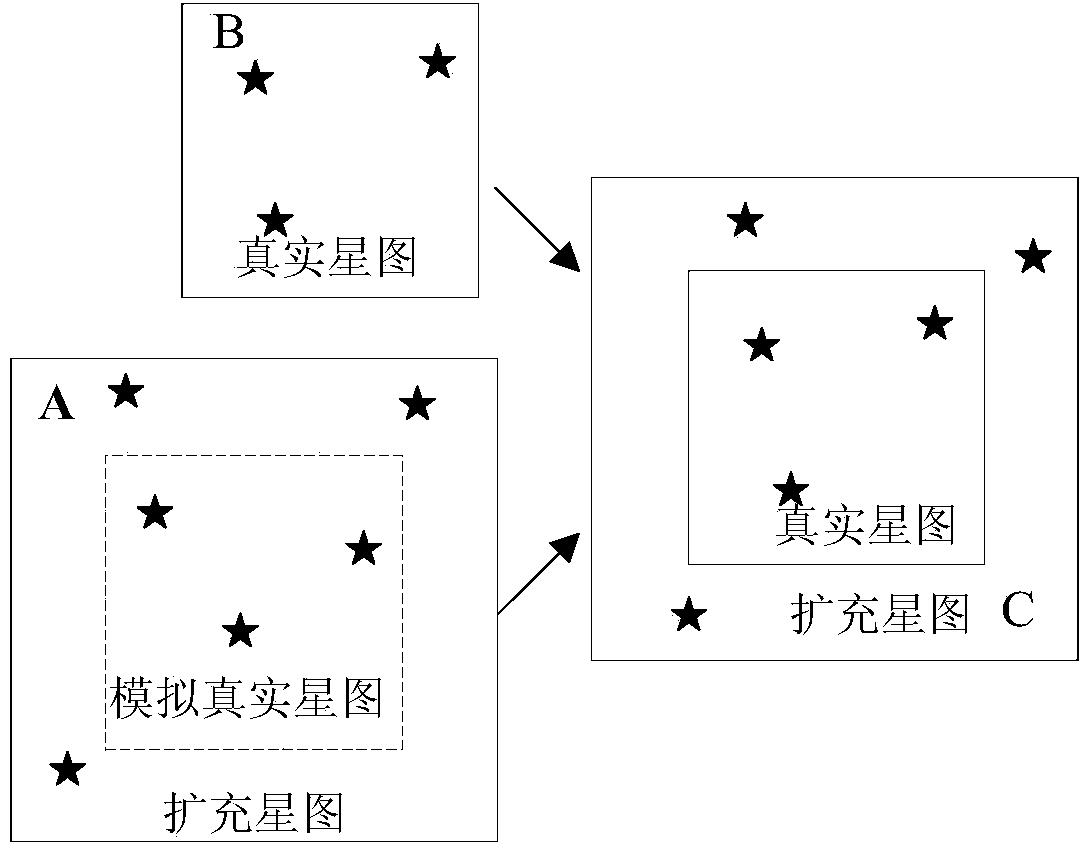
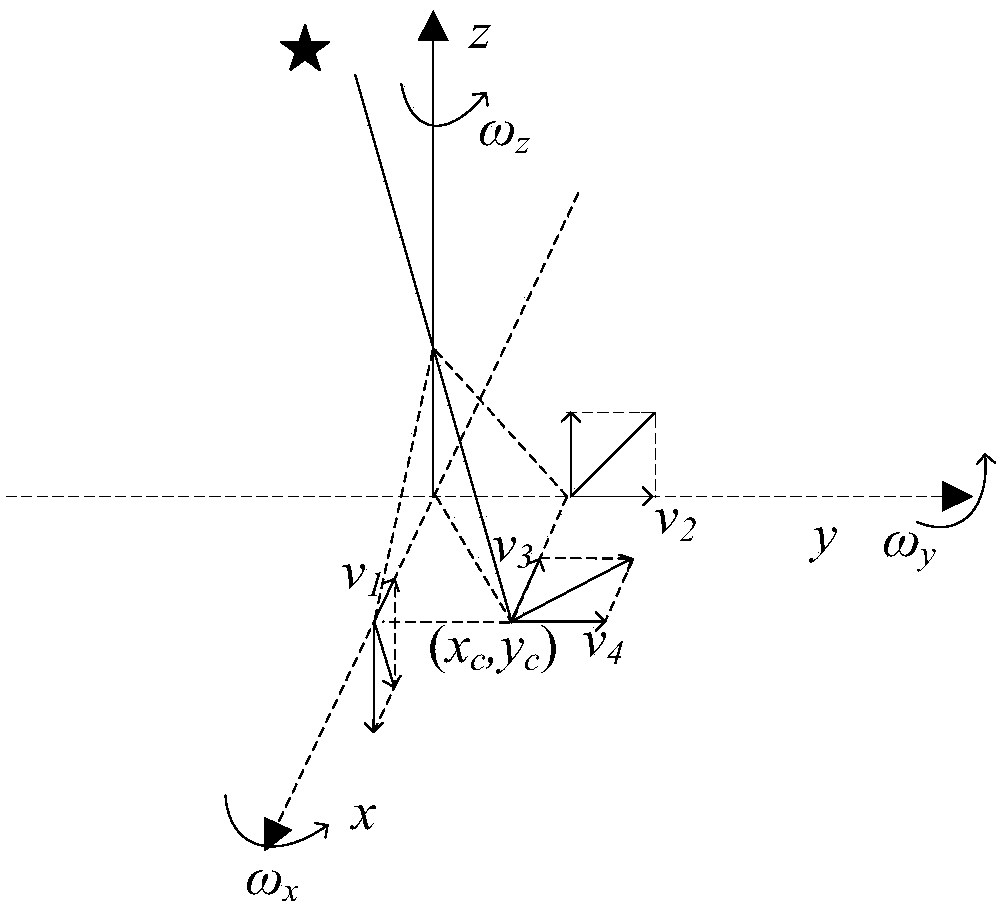
[0054] Step 2: Use the attitude of the carrier and the output information of the gyroscope to calculate the boresight direction of the star sensor at the current moment, and use the obtained boresight direction to select stars from the star catalog to generate a simulated star map;
[0055] Specifically, the implementation steps are:
[0056] Step A: After obtaining the initial attitude of the carrier, calculate the attitude at the current moment according...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More