

A Method of Satellite Attitude Maneuvering Based on Polynomials
A technology of attitude maneuvering and satellite attitude, which is applied in the field of control when the spacecraft performs arbitrary trajectory attitude maneuvering, to achieve the effect of smooth attitude transition, smoothness and avoidance of flexible mode vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
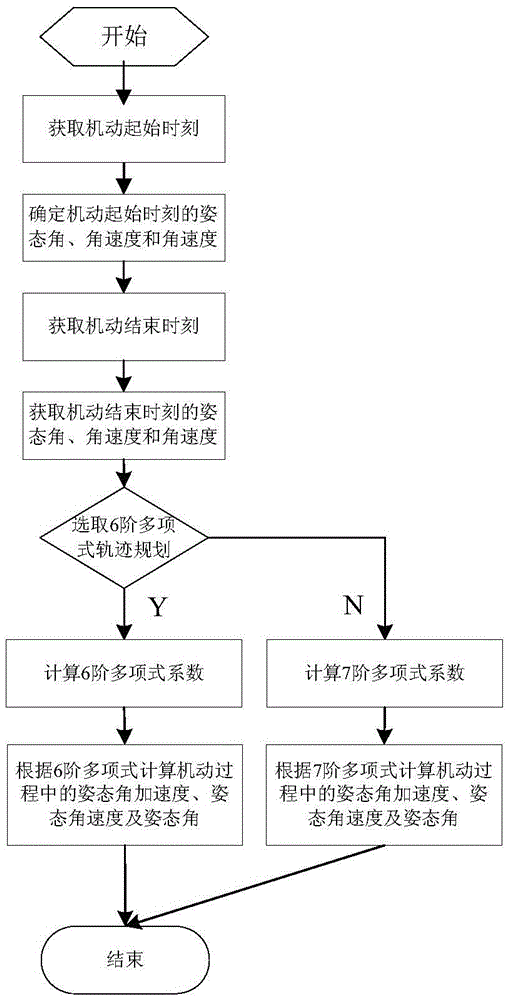
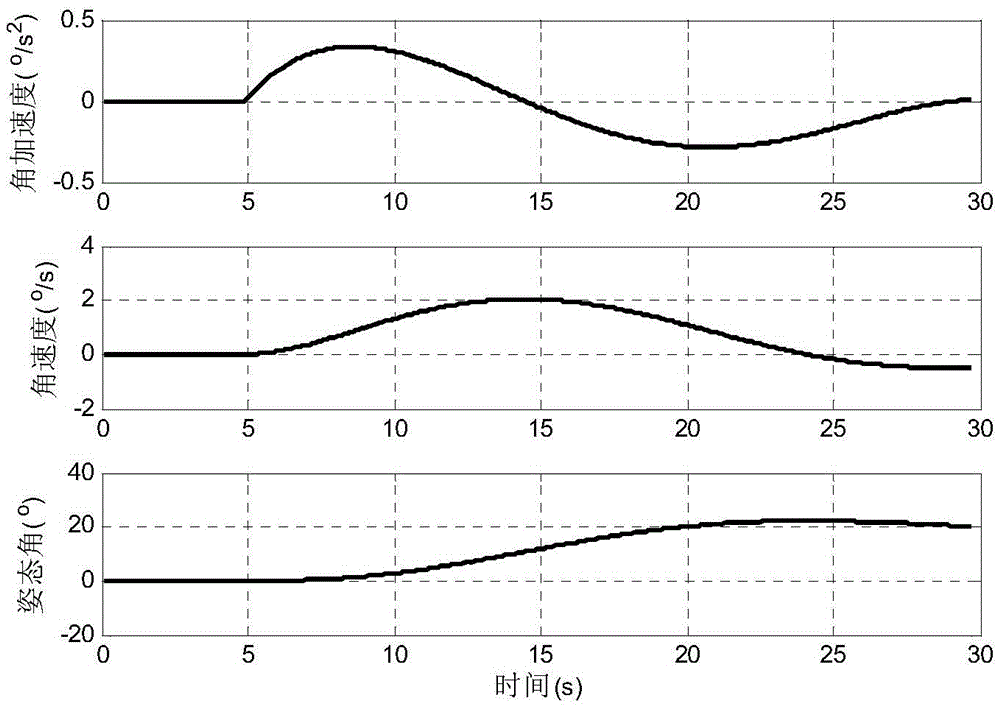
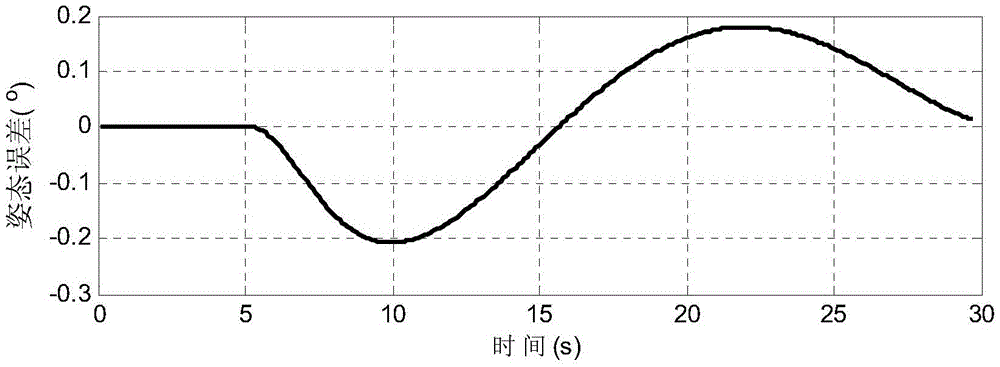
[0071] Take the roll axis attitude maneuver control of a complex satellite as an example. Assuming that the attitude angle, angular velocity and angular acceleration at the initial moment of satellite maneuvering are all zero, after 25 seconds, the satellite needs to have a rolling attitude of 20 degrees, with a rolling angular velocity of -0.5 degrees per second and a rolling angular velocity of 0.005 degrees per second 2 of angular acceleration.
[0072] If a 6th-order polynomial is selected, the coefficients of the 6th-order polynomial are first calculated at the starting moment of the maneuver, and the calculated polynomial coefficients are: a 6 =-1.9997e -8 , a 5 =1.7841e -6 , a 4 =-5.4950e -5 , a 3 =5.9349e -4 , a 2 = 0, a 1 = 0, a 0 = 0, thus obtaining the trajectory of the maneuvering process. The target curves of attitude angle, angular velocity and angular acceleration in the whole process of satellite maneuver calculated according to the 6th order polynom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More