

Multi-degree-of-freedom ankle dynamic exoskeleton
An exoskeleton, ankle joint technology, applied in sports accessories, passive exercise equipment, medical science and other directions, can solve problems such as ankle joint injury, comfort, safety, adaptability and poor rehabilitation effect, to ensure safety Sex, improve rehabilitation efficacy, increase the effect of range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
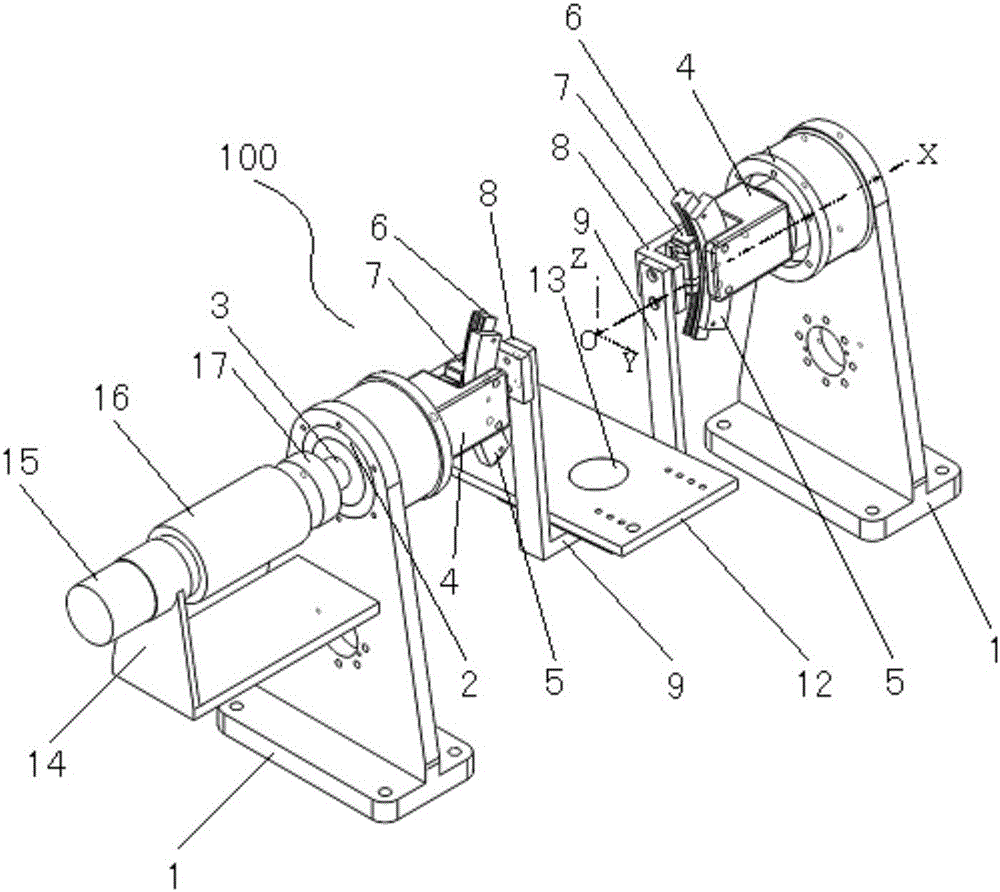
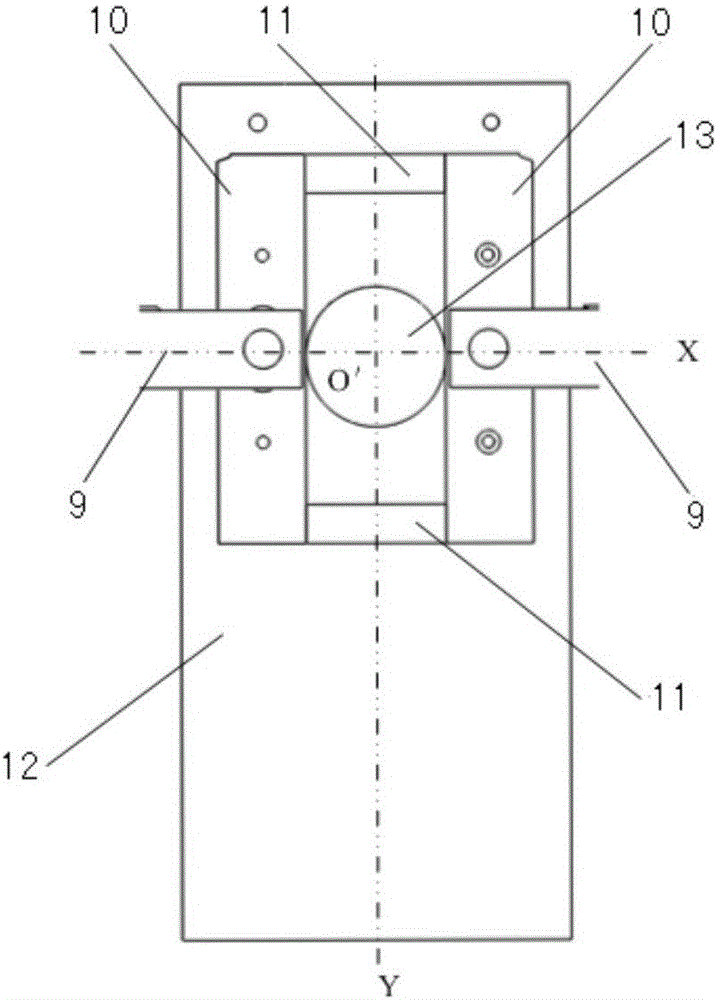
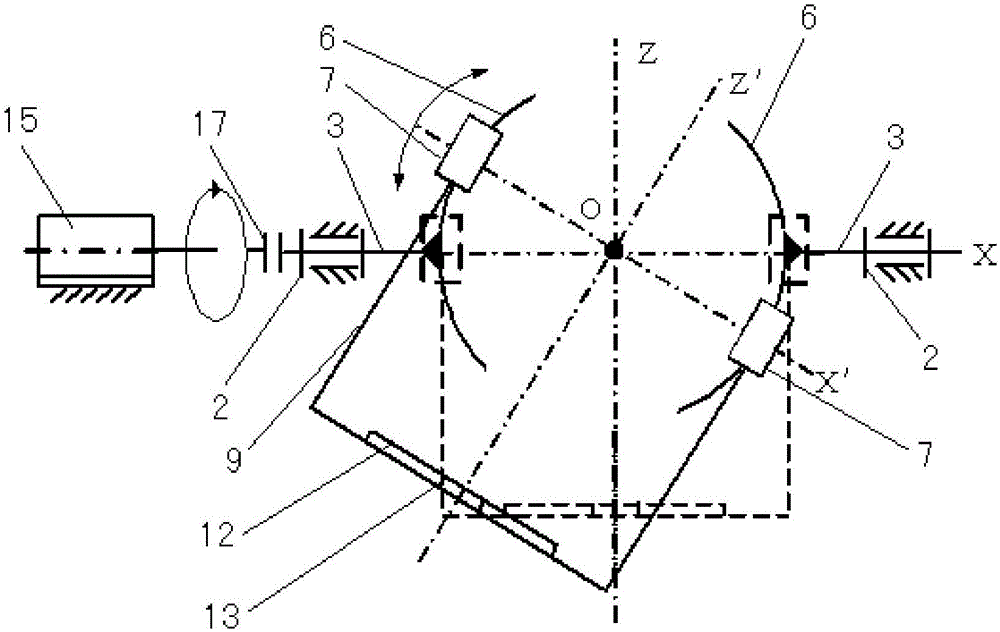
[0017] figure 1 , figure 2 The power exoskeleton 100 provided according to the present invention is shown, and the power exoskeleton 100 includes two machine bases 1 arranged in parallel, and the upper part of each machine base 1 all supports a rotating shaft 3 horizontally along the coronal axis (X axis) through bearings 2 . The inner end of each rotating shaft 3 is fixedly connected to a flexion-extension connector 4 with a cantilever end, and the cantilever end of each flexion-extension connector 4 is fixed to an arc-shaped track 6 through an arc-shaped track fixing member 5, each arc A slide block 7 is all slidably set on the shaped track 6, and a slide block holder 8 is fixedly connected on each slide block 7, and the upper end of an L-shaped connector 9 is fixedly connected on each slide block holder 8, and the two The flexion and extension ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More