

Routing inspection flying robot and overhead power line distance prediction and maintaining method
A flying robot and power line technology, applied in three-dimensional position/channel control and other directions, can solve the problems of not fully considering the safety of flying robots, and unable to obtain and use efficiently and accurately
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The method of the present invention will be further described below in conjunction with the accompanying drawings.
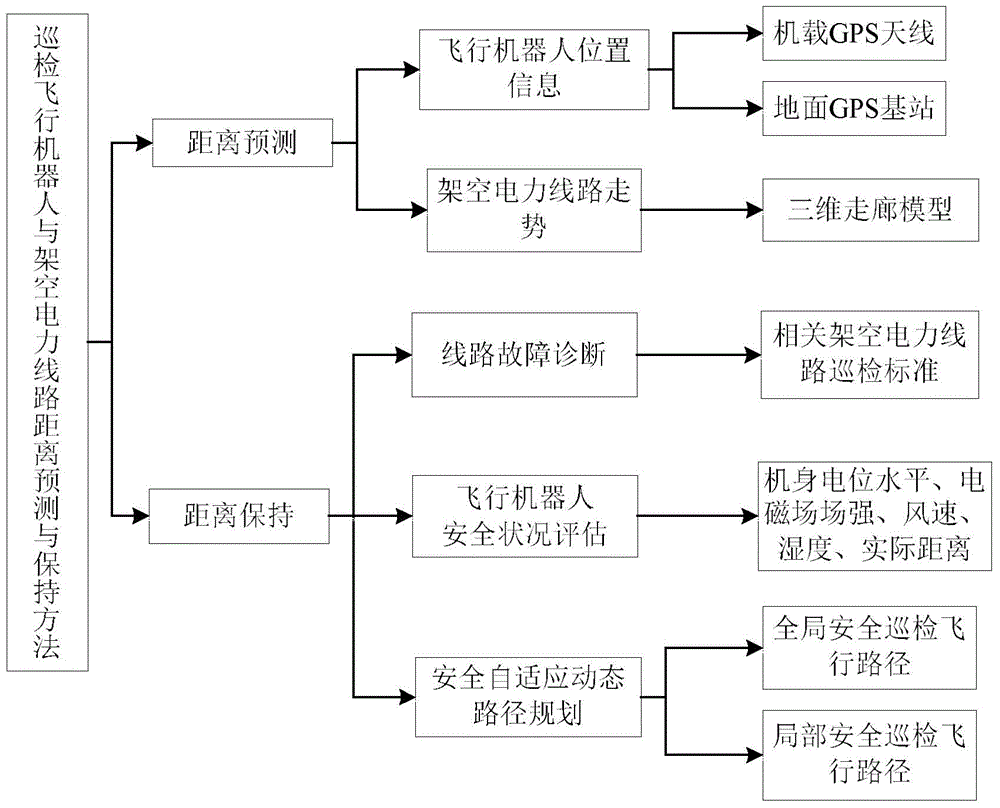
[0025] figure 1 It is a flowchart of the method of the present invention, the method includes a distance prediction method and a distance maintenance method, and the distance prediction method is:
[0026] First, the geographic location coordinates of the current flying robot are determined: the geographic location coordinates are obtained from the geospatial coordinate data of the flying robot provided by the onboard Global Positioning System (GPS) antenna and the ground GPS base station.
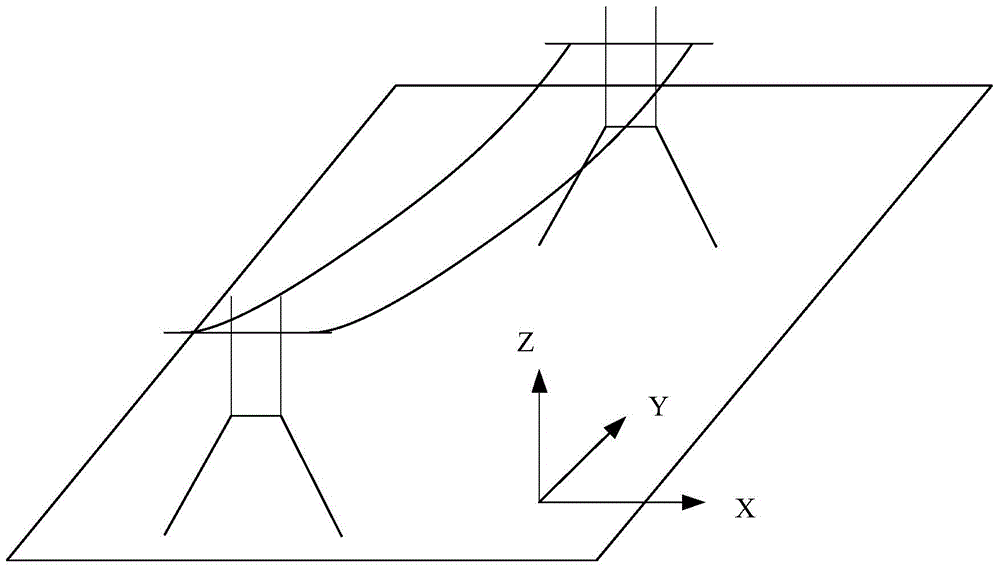
[0027] Then, set the three-dimensional coordinate system XYZ of the three-dimensional corridor model, map the geographic location coordinates of the current flying robot to the existing three-dimensional corridor model, and obtain the coordinates PF(x 0 ,y 0 ,z 0 ), the schematic diagram of the 3D corridor model is shown in figure 2 shown.
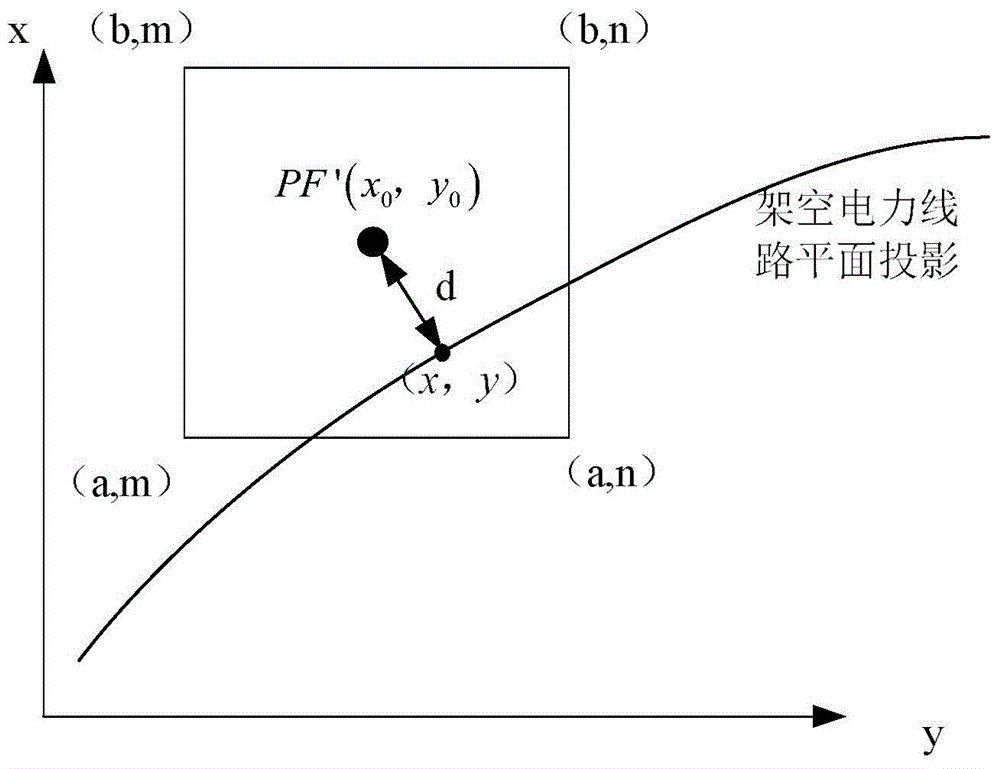
[0028] Finally, in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More