

A system and method for calculating the moving distance of an unmanned aerial vehicle
A technology of moving distance and calculation system, which is applied in the direction of control/regulation system, non-electric variable control, instrument, etc., and can solve the problems of unmanned stable control and inconsistent recognition of translation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
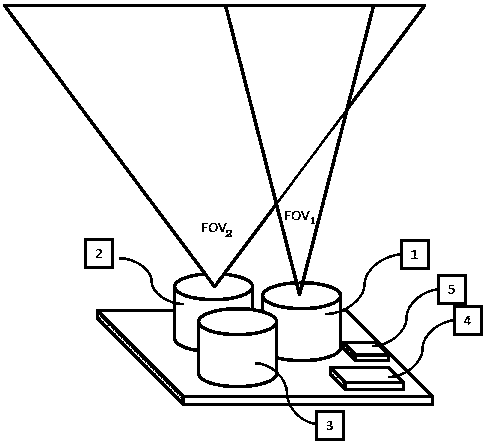
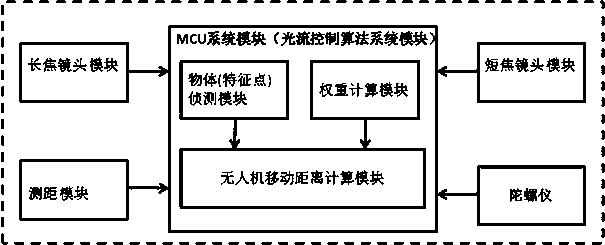
[0014] Such as figure 1 , 3 As shown, the UAV moving distance calculation system in this embodiment includes a telephoto lens module 1, a short-focus lens module 2, a ranging module 3, an optical flow control algorithm system module (MCU system module) 4 and a gyroscope 5. Each module is described in detail below:
[0015] The telephoto lens module 1 is used to provide the image acquired by the telephoto lens to the optical flow control algorithm system module 4 .
[0016] When the telephoto lens is determined, the resolution R of the telephoto lens 1 To determine the value, the angle of view FOV of the telephoto lens 1 to determine the value. Therefore, for the telephoto lens, the moving distance D of the drone calculated by the telephoto lens based on two frames of images 1 =P 1 / R 1 (H*2.0*tan(FOV 1 / 2)), P 1 is the amount of pixels moved by the object on the telephoto lens compared with the previous frame image, and H is the height of the drone obtained by the ran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More