

Navigation method of electric power inspection robot
A technology of electric power inspection and navigation method, applied in the field of navigation, to achieve the effect of improving obstacle avoidance ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] Such as figure 1 As shown, the navigation method of the power inspection robot of the present invention comprises the following steps:
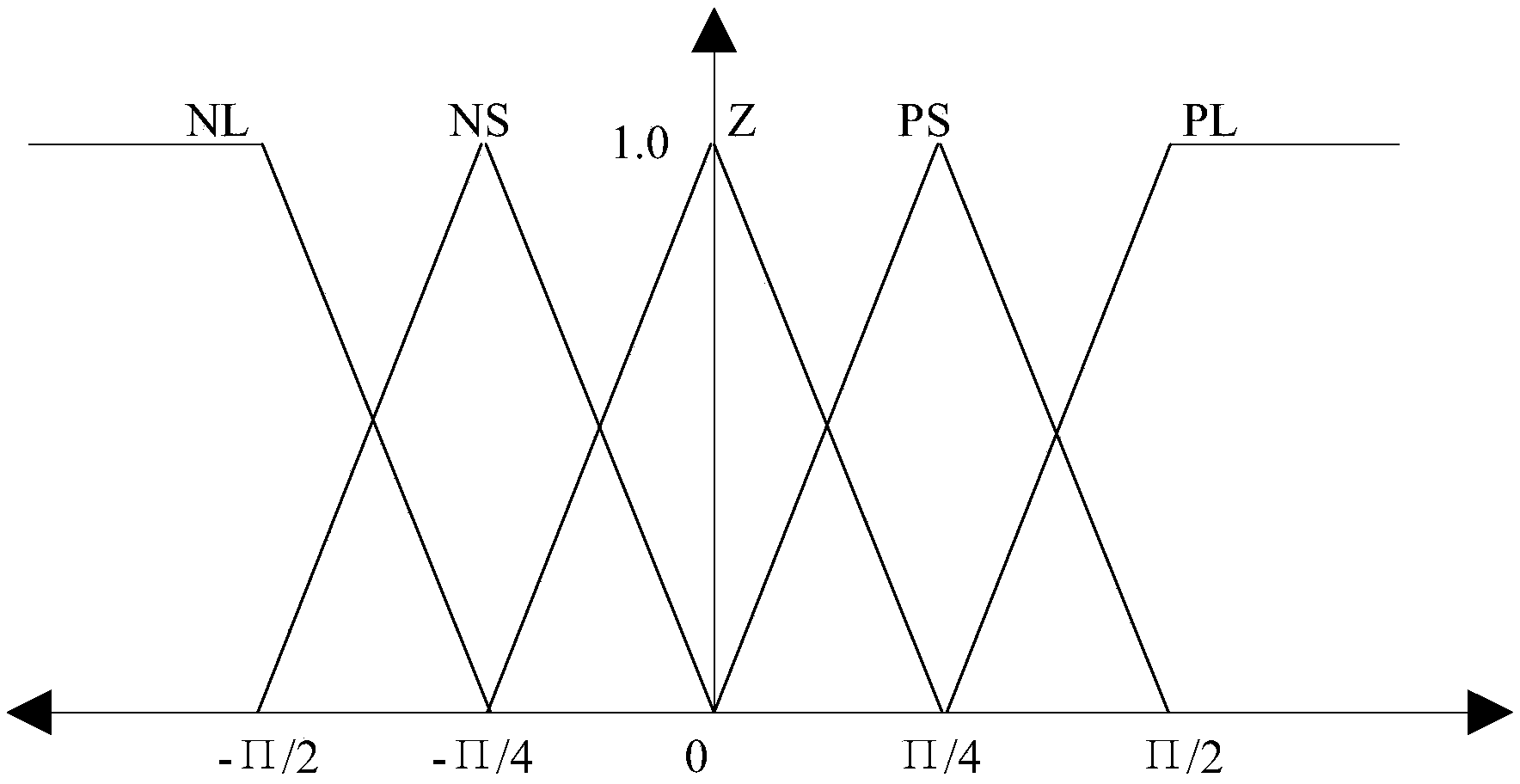
[0033] Step 1. Establish a fuzzy controller for the motion of the power inspection robot, and determine the input variables and output variables of the fuzzy controller. The specific steps are:
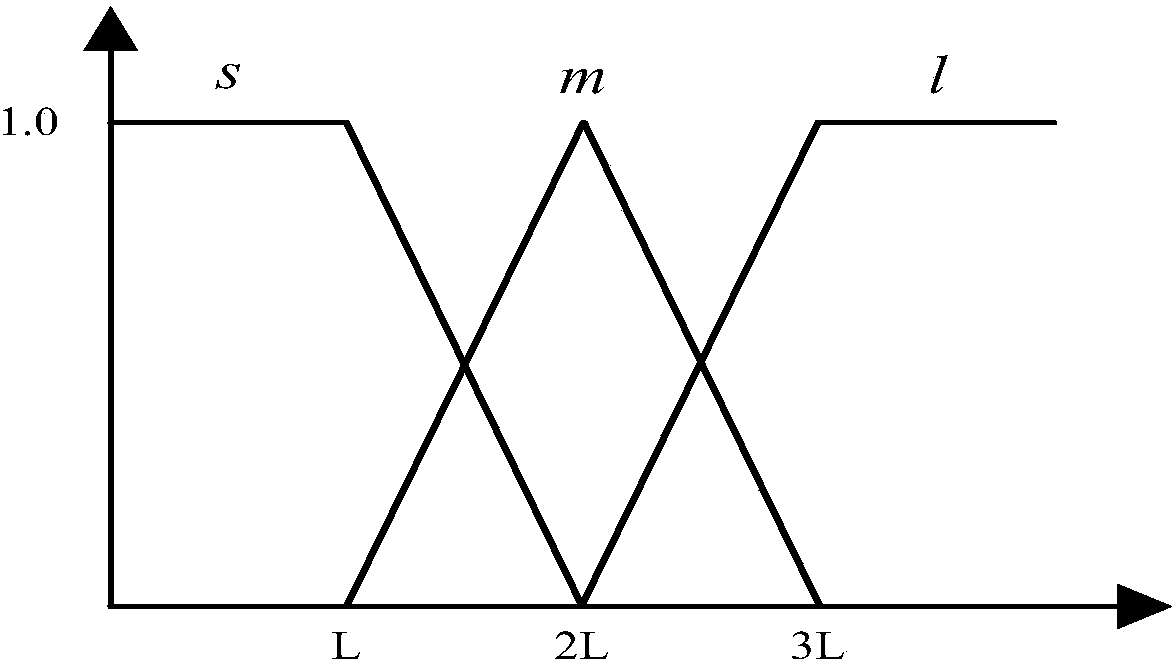
[0034] (1-1) Divide the 180-degree range in front of the power inspection robot into three parts: the front, the left front, and the right front, and measure the obstacle information in the three directions through the sensor, that is, the front obstacle information F, The left front obstacle information L and the right front obstacle information R, in actual collection, the distance sensor can be used to collect the obstacle distance in front, the obstacle distance in front left and the obstacle distance in front right, and the obstacle distance in front , The distance of the obstacle in front of the left and the distance of the obstacle in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More