

Texture force touch sensing method based on single image fractional order processing
A single image, tactile perception technology, applied in image data processing, image analysis, image enhancement and other directions, can solve problems such as loss of details and textures, unreal three-dimensional surface contours, and misjudgment of contour recognition and texture perception results, to avoid Misjudgment, guaranteed comprehensive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Below in conjunction with embodiment and description accompanying drawing, the embodiment of technical scheme of the present invention and specific operation process are described in detail, but embodiment is only preferred embodiment of the present invention, it should be pointed out: for those of ordinary skill in the art On the premise of not departing from the principle of the present invention, several improvements and equivalent replacements can also be made, and these technical solutions after improvements and equivalent replacements to the claims of the present invention all fall within the protection scope of the present invention.
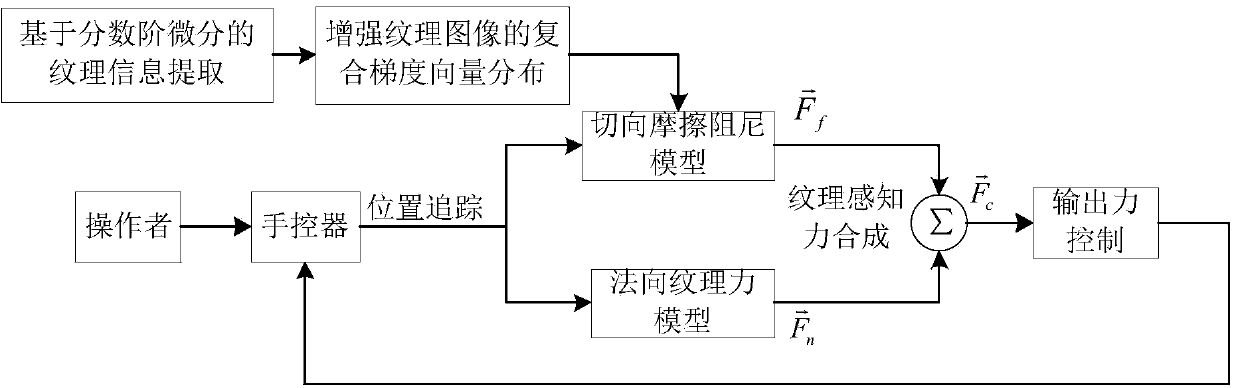
[0038] see figure 1 , in order to truly reproduce the tactile feeling of the image texture, the original image is preprocessed with the fractional order differential algorithm, and the order can be selected artificially to realize the multi-scale analysis of the detailed texture and edge contour, and obtain the enhanced texture imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More