Vehicle control apparatus, and method of controlling railroad hybrid vehicle
A vehicle control device and vehicle drive technology, which can be applied to the layout of multiple different prime movers of hybrid vehicles and general power plants, and engine-driven traction. It can solve the problems of engine starting failure and time-consuming, and achieve smooth And the effect of reliable starting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
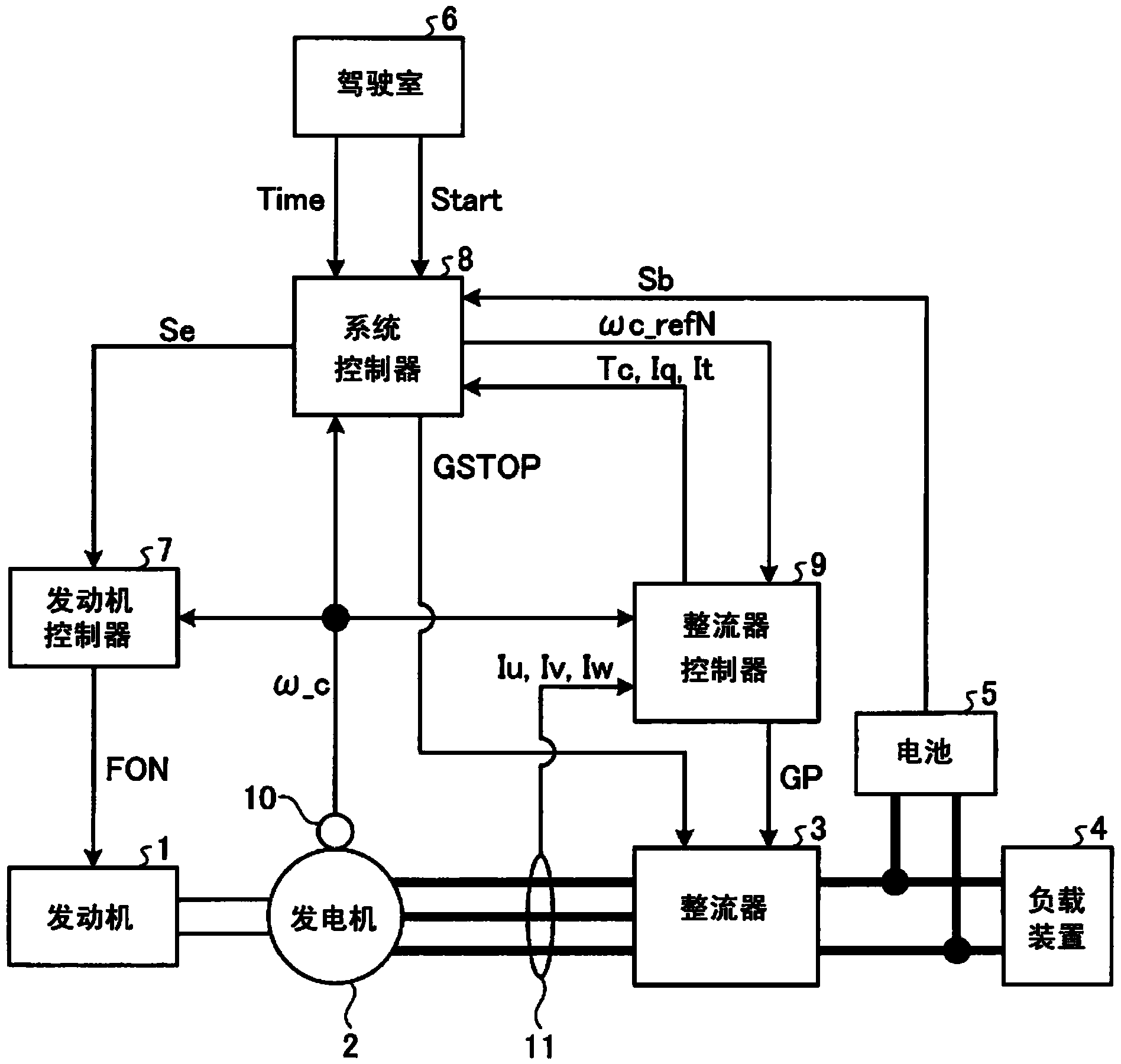
[0027] figure 1 It is a diagram showing a configuration example of a vehicle drive system including the vehicle control device according to Embodiment 1 of the present invention, and shows a configuration when applied to a series hybrid type engine system. like figure 1 As shown, the vehicle drive system involved in Embodiment 1 adopts the following structure, that is, includes: an engine 1; a generator 2 driven by the engine 1 and outputting alternating current; a rectifier 3 that converts alternating current into a desired direct current; and the rectifier 3 Load device 4 and battery 5 for electrical connection; driver's cab 6 for vehicle control; engine controller 7 for controlling engine 1; system controller for controlling engine controller 7 and rectifier controller 9 described later 8; a rectifier controller 9 for adjusting the power of the load device 4 and the battery 5; and a rotation speed detector 10 and a current sensor 11 as sensors.
[0028] Next, refer to F...
Embodiment approach 2
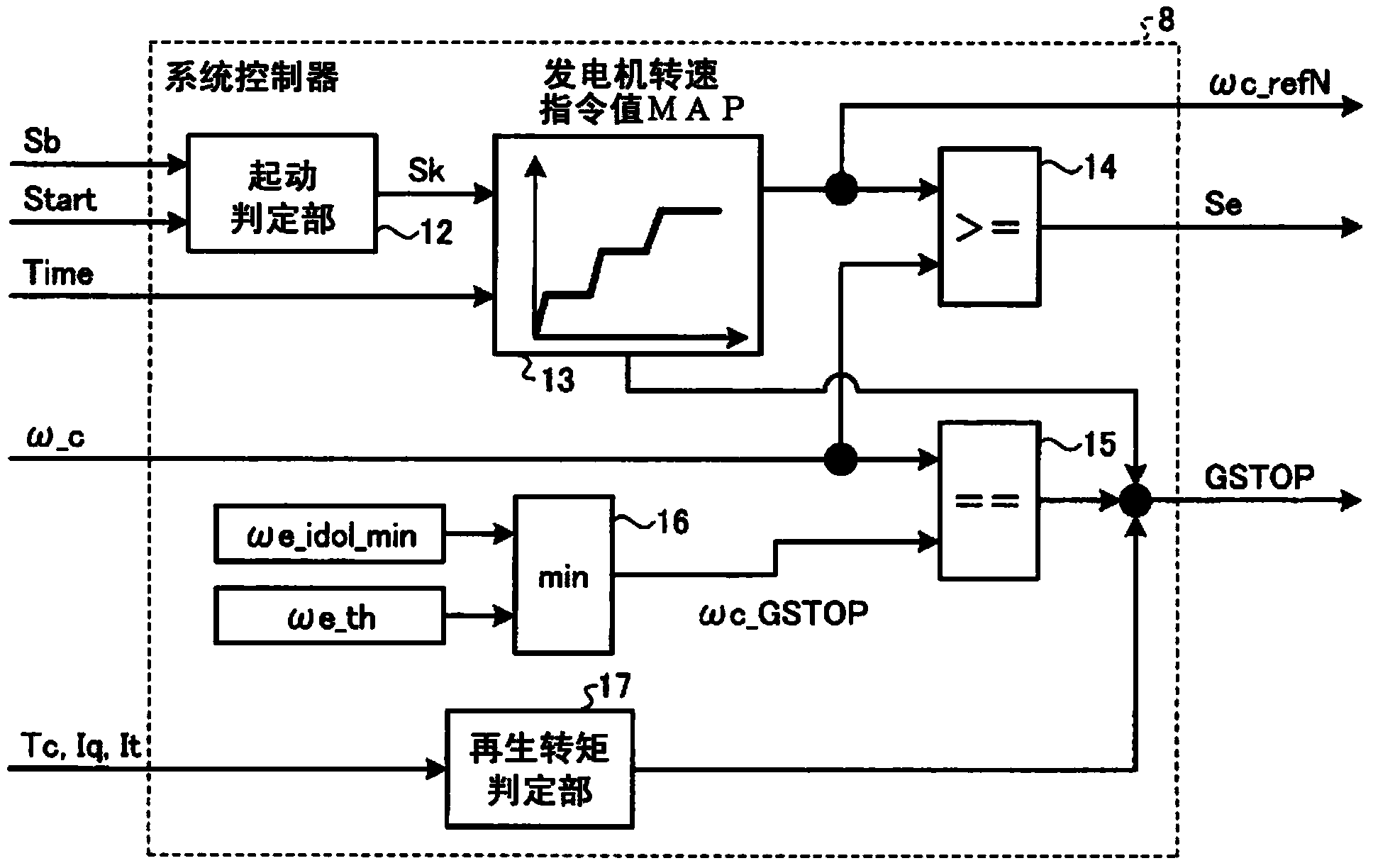
[0067] Figure 10 It is a figure explaining the activation method (fifth activation method) concerning Embodiment 2. Comparing the fifth starting method with the fourth starting method according to Embodiment 1, the difference lies in the timing at which the gate-off signal GSTOP is transmitted from the system controller 8 to the rectifier 3 . The voltage controller 18 that is arranged on the rectifier controller 9 (referring to Figure 5 )use figure 1 At least two of the phase currents Iu, Iv, and Iw detected by the current sensor 11 generate a gate signal GP for controlling the rectifier 3 . The control performed by the voltage controller 18 is referred to as vector control, but when this vector control is performed, the vector divided current It is recognized. Therefore, power running / regeneration can be judged from the sign of the torque sub-current It. Additionally, the function as image 3 As shown, it is executed by the regenerative torque determination unit 17 pro...
Embodiment approach 3
[0069] Figure 11 It is a figure explaining the activation method (sixth activation method) concerning Embodiment 3. Comparing the sixth starting method with the fifth starting method according to Embodiment 2, the difference lies in the detecting means for detecting regenerative torque. More specifically, in Embodiment 3, the torque detector 21 is provided on the shaft connecting the engine 1 and the generator 2 , and the value of the generator axis torque Tck is detected from the torque detector 21 . This generator axis torque Tck is sent to the regenerative torque determination unit 17 of the system controller 8 , and the regenerative torque determination unit 17 determines the presence or absence of a regenerative operation. Note that subsequent operations are the same as those in Embodiment 2 described above, and thus detailed description thereof will be omitted.
[0070] According to the sixth starting method, when the engine 1 is started using the generator 2, it is d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



