

Three-axis automatic carrying robot
A robot-handling and automatic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low efficiency and cumbersome operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
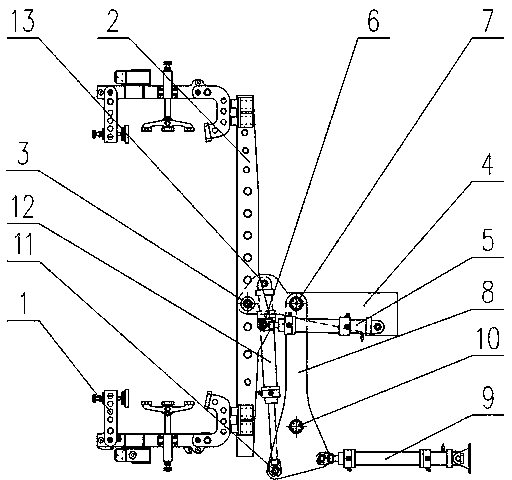
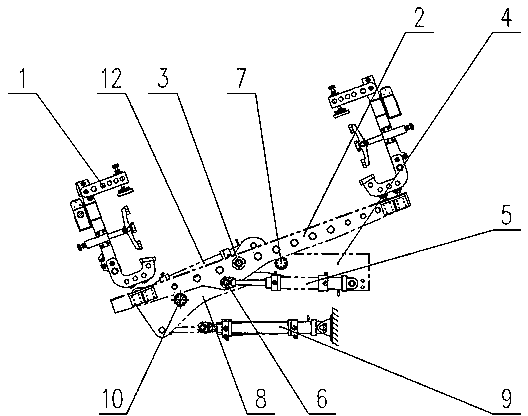
[0009] The specific implementation manner of the present invention will be described below with reference to the accompanying drawings. like figure 1 , figure 2 Shown: a three-axis automatic handling robot, including a swing arm 2 with a clamp 1, a first support arm 4 is hinged on the swing arm 2 through a first rotating shaft 3, and the first support arm 4 is far away from the first One end of the rotating shaft 3 is hinged with a first hydraulic cylinder 5 , the working end of the first hydraulic cylinder 5 is hinged with the swing arm 2 through the second rotating shaft 6 , and is also hinged on the first support arm 4 through the third rotating shaft 7 A second support arm 8 is provided, and the lower end of the second support arm 8 is hinged to the working end of the overturning hydraulic cylinder 9. The cylinder body of the overturning hydraulic cylinder 9 is hinged on the ground, a frame, etc. The middle part of 8 is also hinged with the fixed base by the total rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More