

A handling robot based on elastic driving wheels
A handling robot and elastic drive technology, which is applied in the field of handling robots, can solve the problem of large energy consumption at the moment of starting the load of the motor safely handling the robot, and achieve the effect of avoiding stalled current and improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
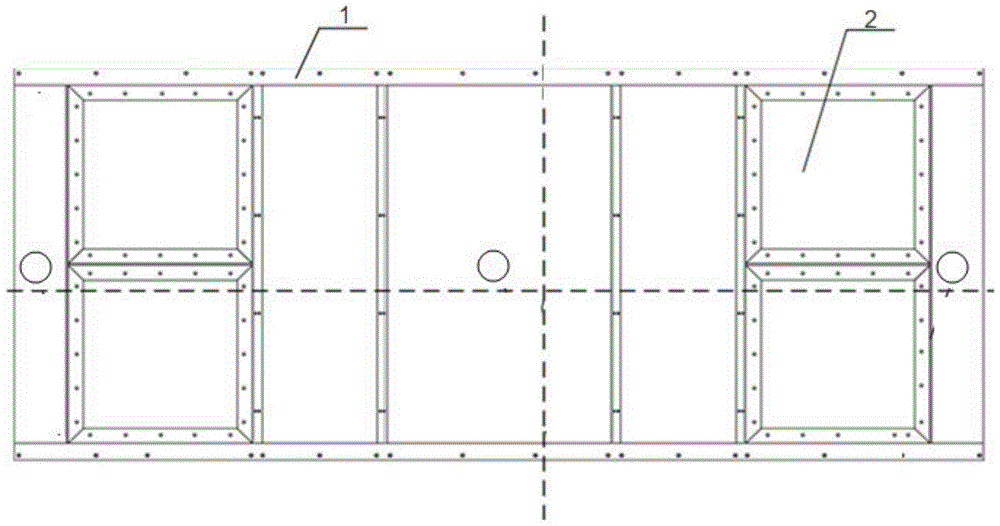
[0025] A handling robot based on elastic driving wheels, such as figure 1 As shown, it includes the AGV car body 1 and four elastic drive units installed under the AGV car body. The four elastic drive units are symmetrically distributed along the longitudinal axis and the transverse axis of the car body and installed on the drive units made at the front and rear ends of the AGV car body. Install in slot 2.
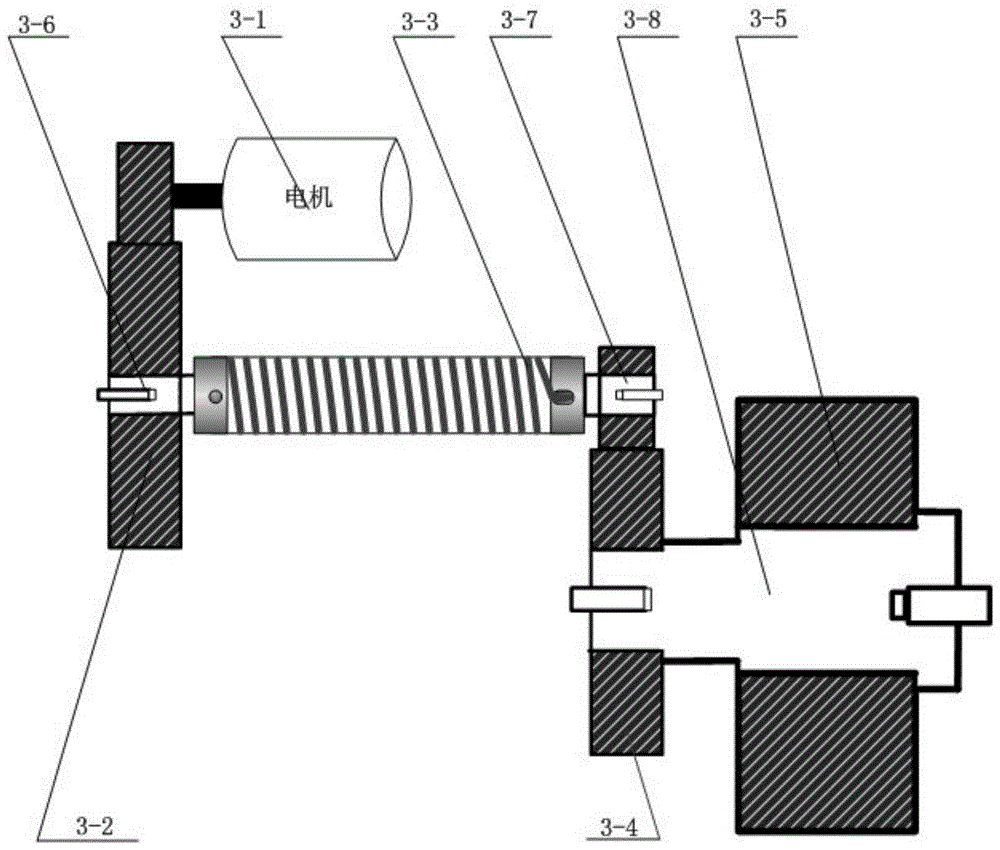
[0026] The elastic drive unit is a two-wheel drive unit using elastic drive wheels. Such as figure 2 As shown, the elastic drive wheel includes a motor 3-1, an input speed change mechanism 3-2, an output speed change mechanism 3-4 and a wheel 3-5, and the motor 3-1 and the input end speed change mechanism 3- 2 are connected together to form a power input end, and the output end speed change mechanism 3-4 is connected with the wheels 3-5 to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More