

Motor servo system bilateral neural network friction compensation and limited time coordination control method
A dual-neural network and servo system technology, applied in the field of motor servo system dual-neural network friction compensation and limited time cooperative control, can solve the problem that the precise model of the friction link is difficult to determine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
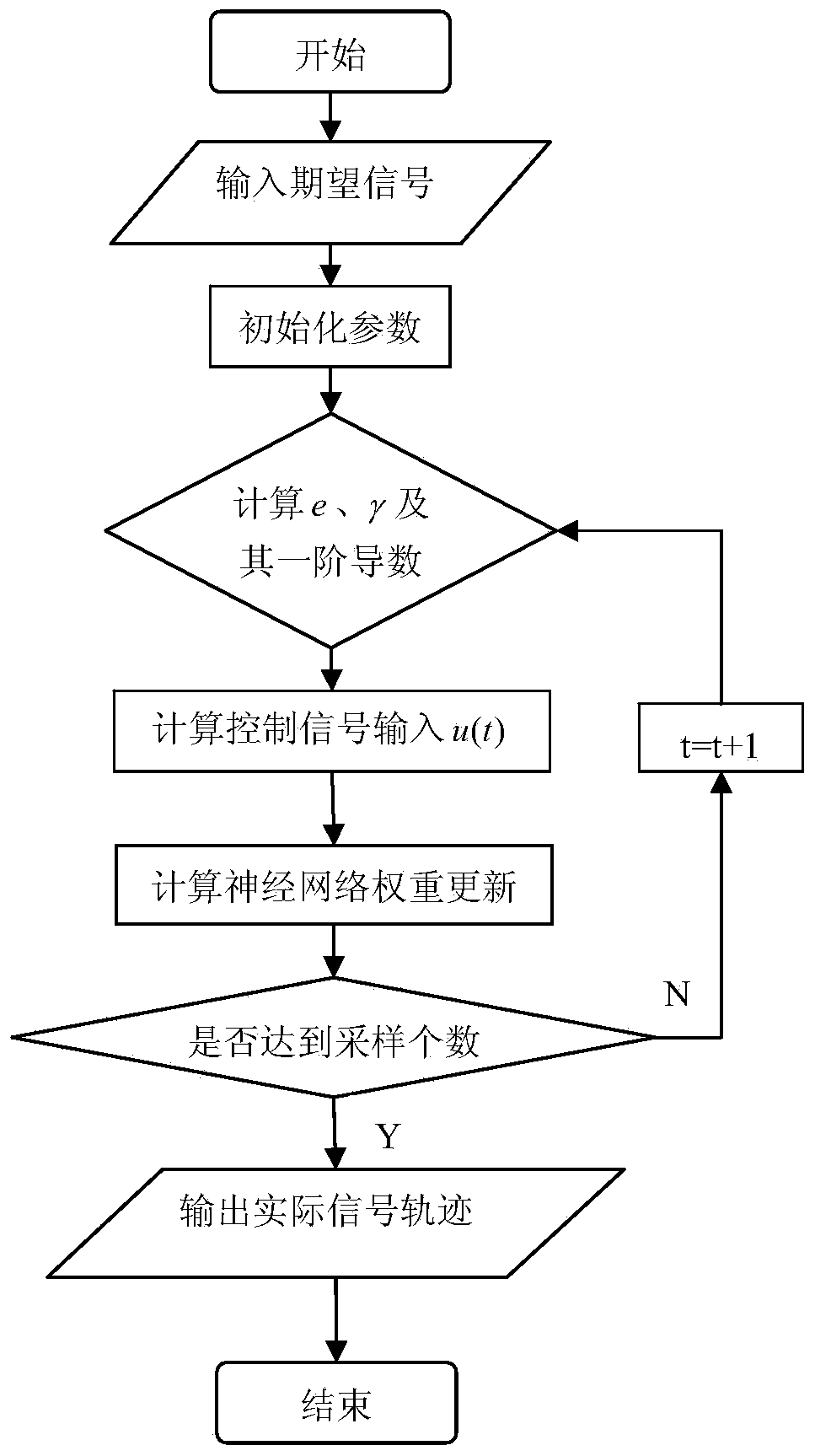
[0065] Refer to attached Figure 1-5 , the dual neural network friction compensation and finite-time cooperative control method for the motor servo system, including the following steps:
[0066] Step 1, establish the motor servo system model shown in formula (1), initialize the system state and related control parameters;
[0067] m x · · = - K f x + u ( t ) - F - - - ( 1 )
[0068] Among them, m is the effective mass; x is the state variable, indicating the position of the motor rotor; u(t) is the control signal, indicating the voltage changing with time; K f is the damping coefficient, which is a constant value parameter; F is the unknown nonlinear friction force. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More