

A Dynamic Measurement Error Compensation Method Based on Wire-Drawn Encoder Measurement System
A cord-drawing encoder and dynamic measurement technology, applied to measuring devices, instruments, etc., can solve the problems of bulky size, dynamic measurement speed limitation, and reduction of three-dimensional coordinate dynamic measurement accuracy, etc., and achieve simple calculation process, easy implementation, and improved Effect of Dynamic Measurement Accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Embodiments of the present invention will be described in detail below with reference to the accompanying drawings. It should be noted that the technical features or combinations of technical features described in the following embodiments should not be regarded as isolated, and they can be combined with each other to achieve better technical effects. In the drawings of the following embodiments, the same reference numerals appearing in each drawing represent the same features or components, which can be applied in different embodiments.
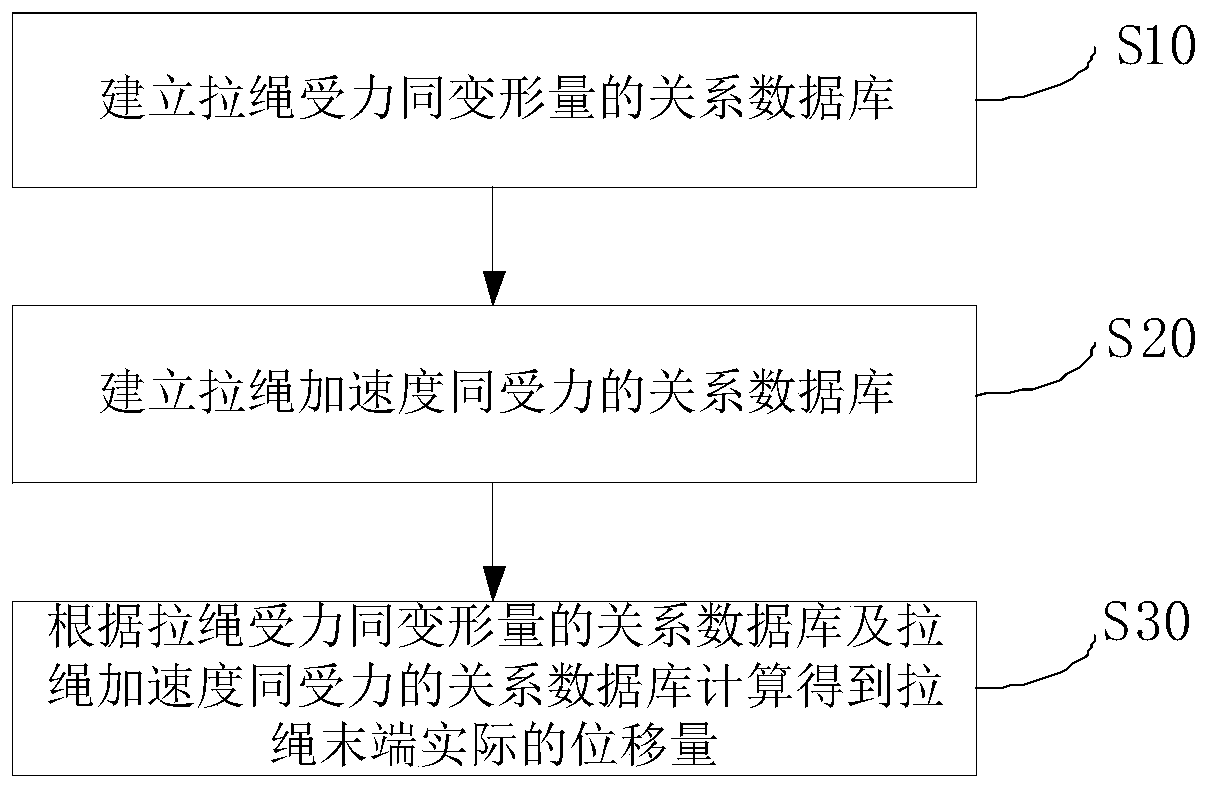
[0023] like figure 1 As shown, the present invention provides a kind of dynamic measurement error compensation method based on cord-stay encoder measurement system, and the steps are as follows:
[0024] Step S10 establishes a relational database between the amount of deformation of the stay rope and the stress, and the steps are as follows:
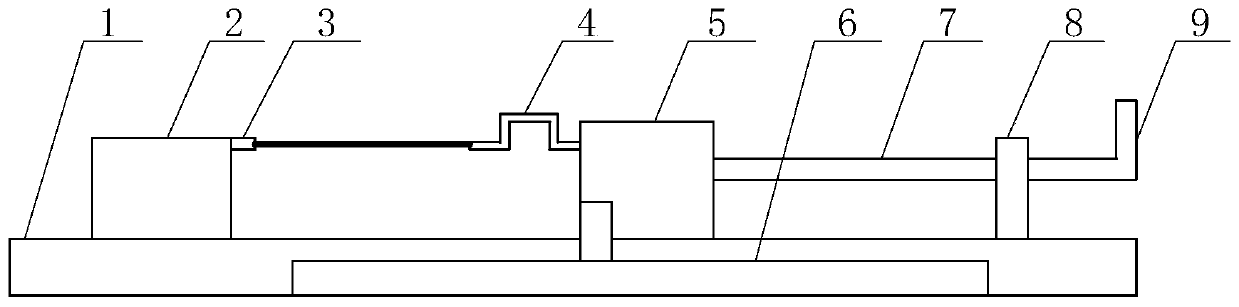
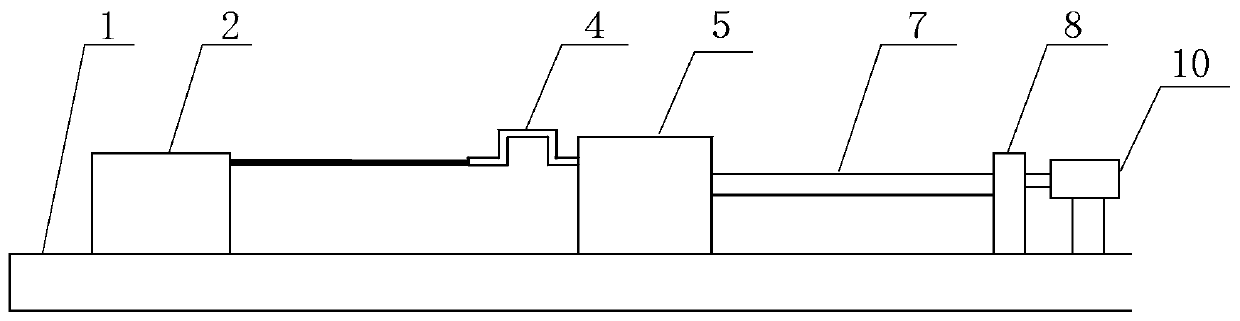
[0025] Step S11 sets up the force-deformation test platform of the stay rope, such as fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More