

Sequential estimation in a real-time positioning or navigation system using historical states
A state estimation, positioning system technology, applied in satellite radio beacon positioning systems, navigation, positioning and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
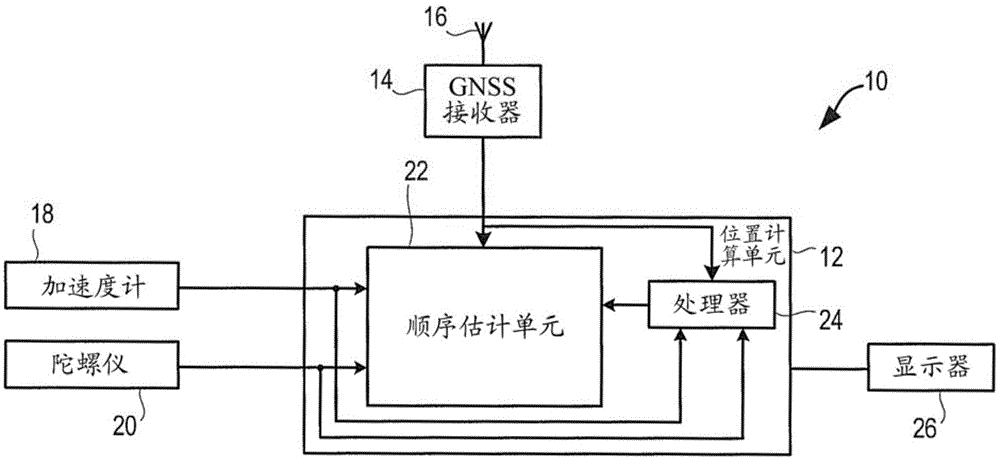
[0026] The present invention relates to methods of sequential estimation and systems for performing such sequential estimation. In one embodiment, the sequential estimate is a sequential estimate of the location of the device. figure 1 A navigation system 10 is shown as an example of a navigation system according to an aspect of the present invention.
[0027] The navigation system 10 includes a position calculation unit 12 . In this illustrative embodiment, position calculation unit 12 receives an input signal from Global Navigation Satellite System (GNSS) receiver 14 connected to antenna 16 . The position calculation unit 12 also receives input signals from an accelerometer 18 and a gyroscope 20 . The position calculation unit 12 includes a sequence estimation unit 22 and a processor 24 . The output from the position calculation unit 12 is provided to a display device 26 .
[0028] Typically, position calculation unit 12 receives input signals from GNSS receiver 14 , acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More