

A Differential Fuzzy Combination Control Method for Driving Anti-skid of Electric Vehicles
A technology of combined control for electric vehicles, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of PID parameters not being adaptable, affecting the driving anti-skid effect, and difficult to achieve driving anti-skid, etc., to achieve strong Inheritance, elimination of jitter and chatter, smooth effect of drive skid control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
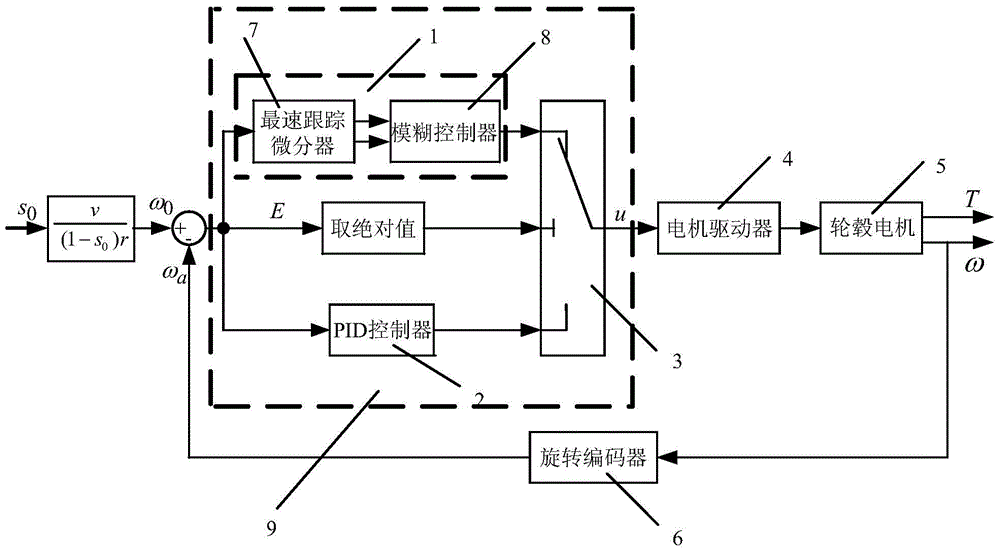
[0027] Such as figure 1 As shown, an electric vehicle driving anti-slip control method includes TD-Fuzzy1, PID controller 2, threshold switch 3, motor driver 4, hub motor 5 and rotary encoder 6. The TD-Fuzzy1 includes a fastest-tracking differentiator 7 and a fuzzy controller 8 . will be given by the expected slip rate s 0 The converted desired wheel speed ω 0 and the actual wheel speed ω measured by the rotary encoder a After comparison, the error signal E of the rotational speed is obtained, which is sent to the TD-Fuzzy and PID combined controller 9; the threshold switch 3 selects the TD-Fuzzy1 or the PID controller 2 according to the magnitude of the error signal sent. When the absolute value of the error signal is greater than the set value of the threshold switch 3, the TD-Fuzzy1 is selected; when the absolute value of the error signa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More