

PID control method, apparatus and system based on network optimization algorithm
A technology of network optimization and control method, applied in the direction of controller, electric controller, etc. with specific characteristics, can solve the problems of rarely considering uncertain factors, difficult to realize, difficult to meet the heading control of unmanned boats, etc. The effect of adaptability, strong robustness, and easy engineering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
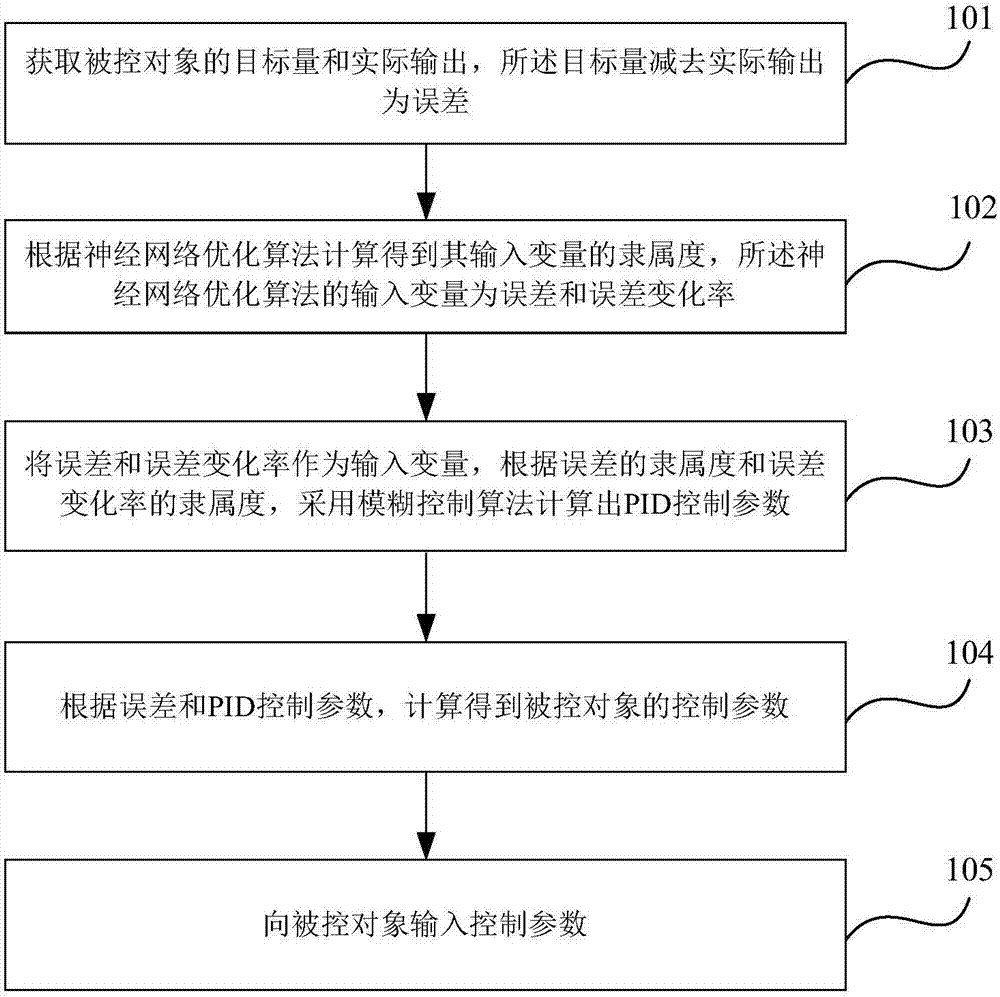
[0028] Such as Figure 1 to Figure 4 As shown, the PID control method based on the network optimization algorithm involved in the present invention is mainly used in the heading control of unmanned boats, including the following steps:
[0029] 101. Obtain the target quantity and actual output of the controlled object, the target quantity minus the actual output is an error; the target quantity is the target heading of the unmanned boat, the actual output is the actual heading of the unmanned boat, the The error is heading error.
[0030] Set the calculation formula of conventional incremental PID controller, the formula is as follows:
[0031] Δu(t)=u(t)-u(t-1)=K P Δe(t)+K I e(t)+K D [Δe(t)-Δe(t-1)]
[0032] e(t)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More