

Novel hoisting action planning method for crane
A technology of cranes and crawler cranes, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as poor path quality, high path cost, and long planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
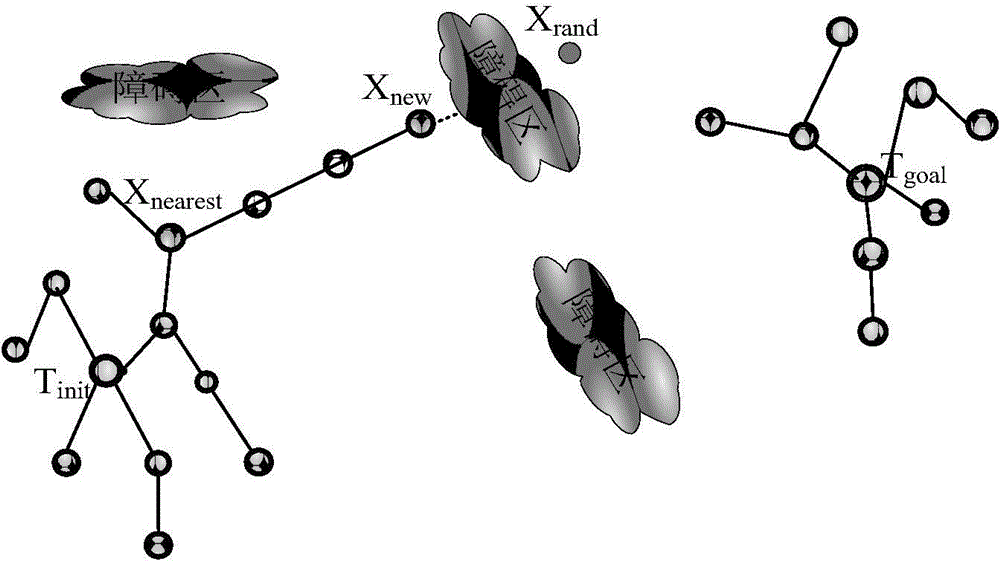
[0033] The RRT-Connect planning method is one of the RRT variant methods widely used at present. In this example, the planning data obtained by the proposed method is compared with the data obtained by the RRT-Connect method in the same hoisting operation to illustrate the planning obtained by this method. The improvement of the path cost (path length), planning time, path detour, and collision detection times of the action sequence.
[0034] In this embodiment, the crane needs to lift the object to be hoisted outside the steel frame, enter between the steel frames from the entrance of the two rows of steel frames, and place the object to be hoisted on the target steel frame through actions such as turning and walking. The rows of steel frames are relatively close to each other, and the obstacle density is relatively high. In this process, collisions must be especially avoided. The planning results obtained by applying the RRT-Connect method and the proposed method are shown in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More