

Planar profile track disturbance-rejection tracking control method
A plane contour and tracking control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of large contour error and tracking performance impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The method of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0040] A method for anti-disturbance tracking control of plane contour trajectory, comprising the steps of:
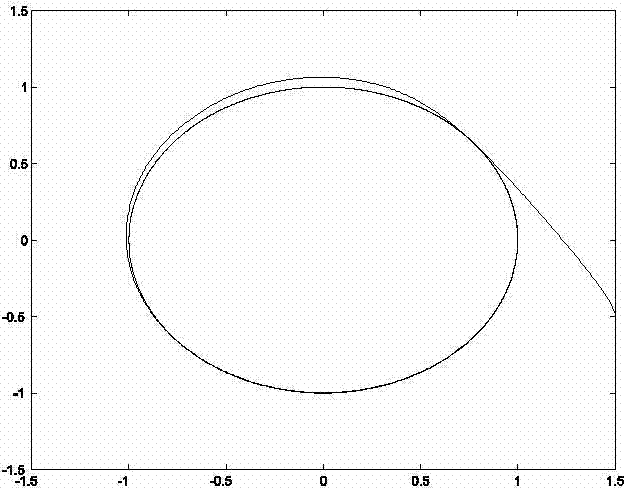
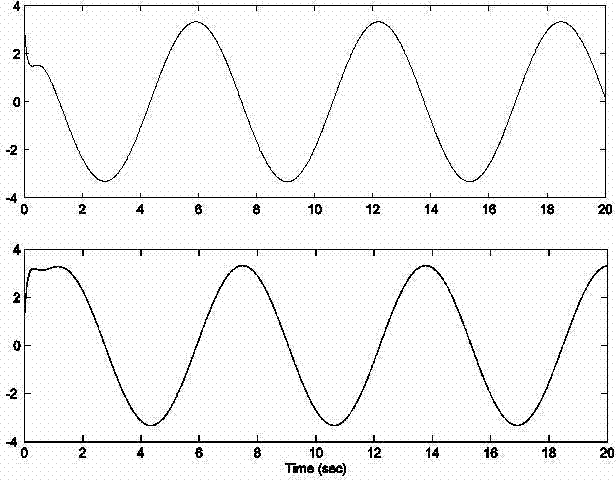
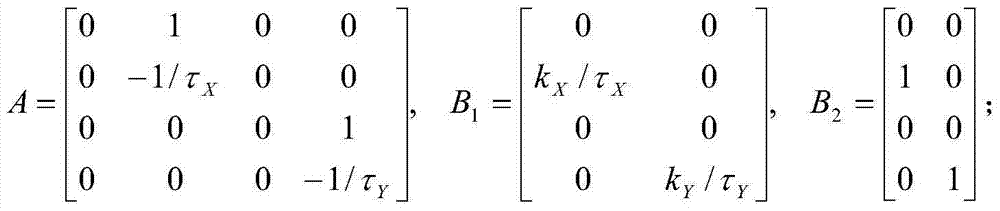
[0041] Step 1. According to the X-axis and Y-axis contour trajectory position function s to be tracked X (t) and s Y (t), establish the mathematical model of the state space disturbance of the plane contour trajectory tracking control, which is equation 1:
[0042] x · ( t ) = Ax ( t ) + B 1 u ( t ) + B 2 d ( t )
[0043] Among them, the symbol "t" represents the time variable; stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More