

Plane profile trajectory tracking control method
A trajectory tracking and planar contour technology, applied in the field of mechanical control, can solve the problems of tracking performance impact, large contour error, etc., and achieve the effects of easy understanding, simple online implementation, and simple design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The method of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0033] A method for designing a planar contour trajectory tracking controller, comprising the steps of:
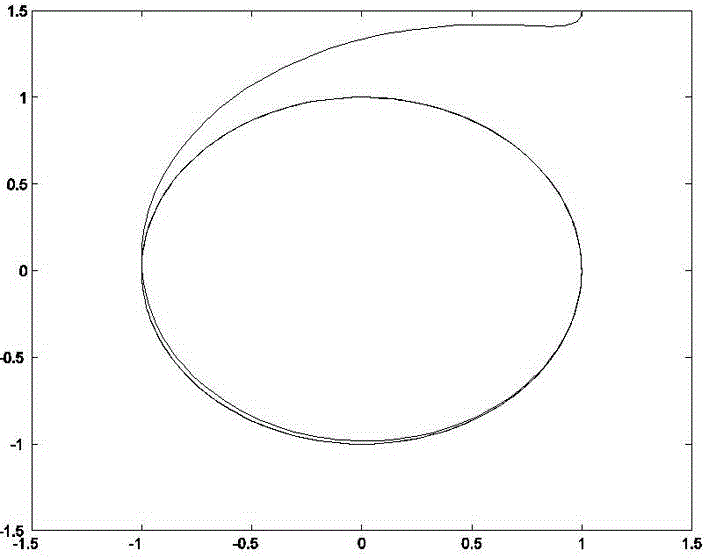
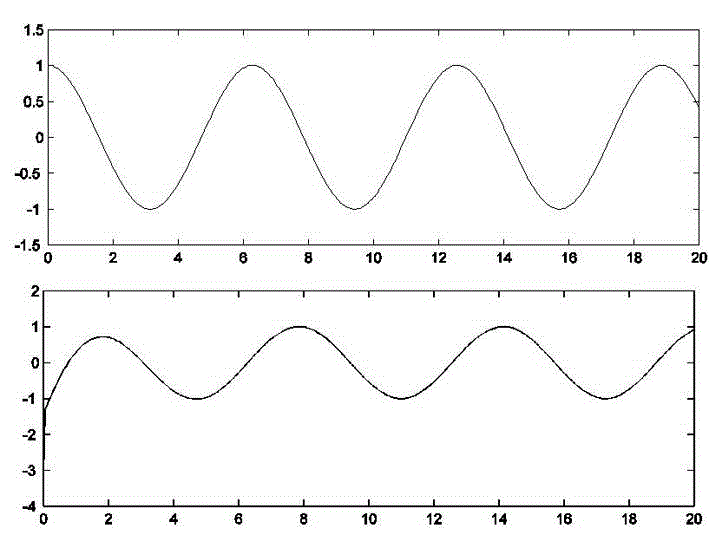
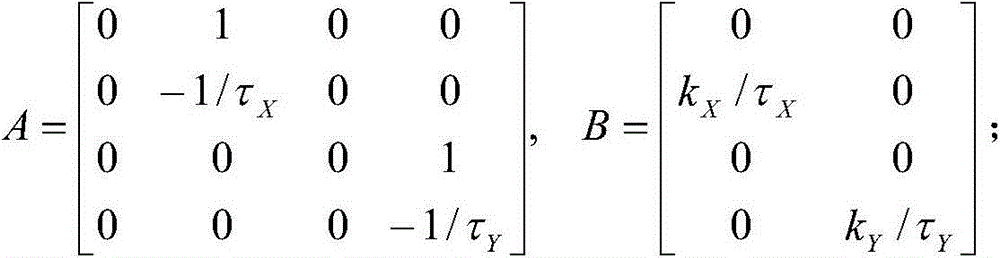
[0034] Step 1. According to the X-axis and Y-axis contour trajectory position function s to be tracked X with s Y , establish the state-space mathematical model of plane profile trajectory tracking control, which is Equation 1:
[0035] x · ( t ) = Ax ( t ) + Bu ( t )
[0036] the s X with s Y The trajectory function related to the time variable, wherein, the symbol "t" represents the time variable; the state vector x=[x 1 x 2 x 3 x 4 ] T , variable x 1 Indicates the X-axis tracking distance, the variable ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More