

Mobile robot path planning method in complex environment
A mobile robot and path planning technology, applied in the direction of instruments, two-dimensional position/channel control, adaptive control, etc., to achieve the effects of improving operating efficiency, accurate operation, improving computing efficiency and convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
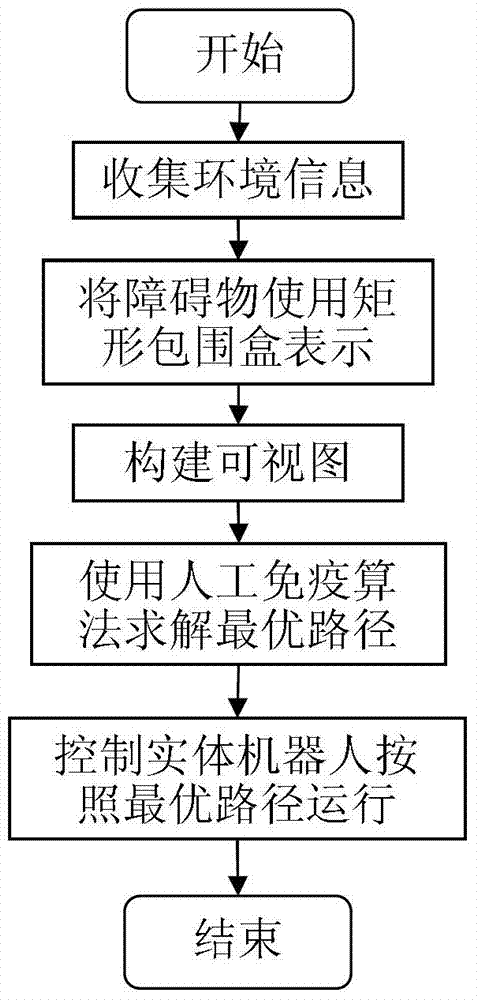
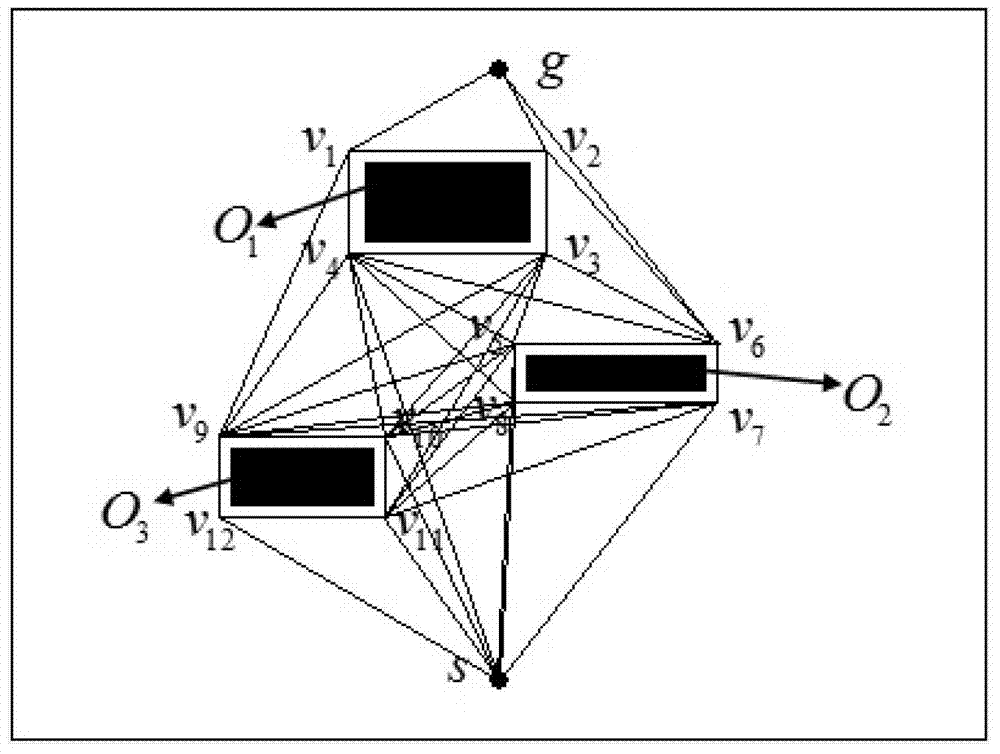
[0038] Such as figure 1 As shown, the mobile robot path planning method in the complex environment of the present invention comprises the following steps:
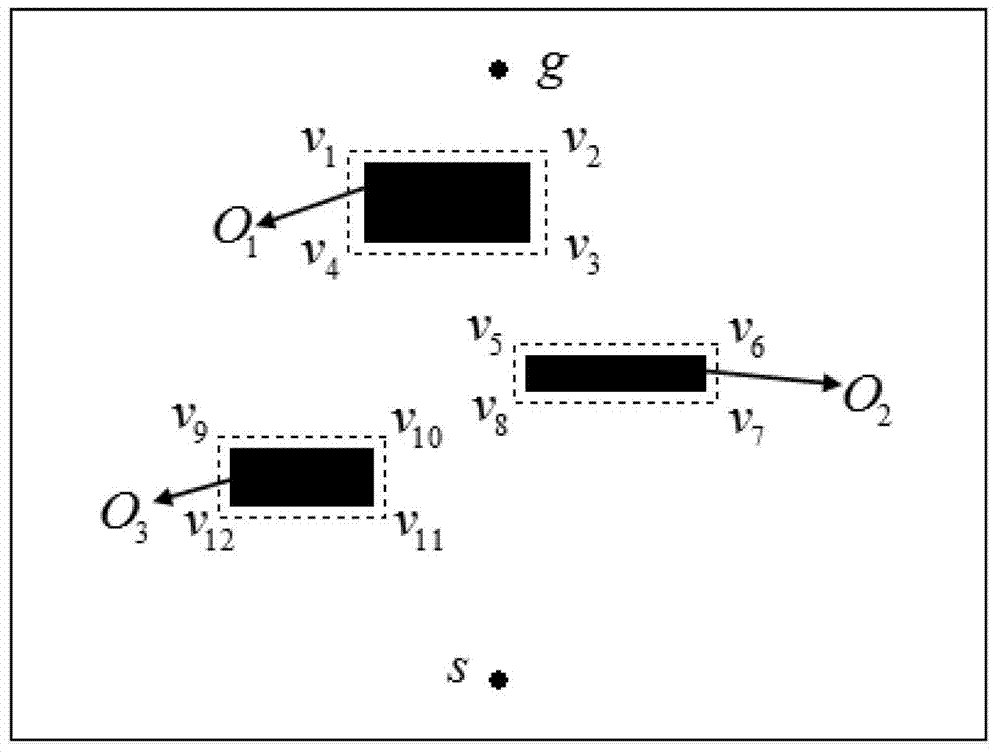
[0039] Step 1: Obtain the environment information of the robot. After processing, the obstacles in the environment space are represented by rectangular bounding boxes, and displayed in the human-computer interaction module.
[0040] This step uses a physical robot to perform roaming operations in an unknown environment. The physical robot is composed of a computer control module, a sensor module, a communication module, a power supply and a drive module, and a moving chassis module. Its size is 480*460*440mm. At the rear, there are three sets of infrared and ultrasonic sensors for sensing environmental information. The robot adopts the left and right wheel independent motor drive mode, which can realize indoor and outdoor movement.
[0041] During the roaming process, the physical robot uses ultrasonic sensors to detect ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More