

Multi-shaft motor synchronization control method and multi-shaft motor synchronization control system
A synchronous control, shaft motor technology, applied in the direction of multiple motor speed adjustment, etc., can solve problems such as unsolvable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention provides a multi-axis motor synchronous control method and a multi-axis motor synchronous control system. In order to make the purpose, technical solution and effect of the present invention clearer and clearer, the present invention will be further described in detail below. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
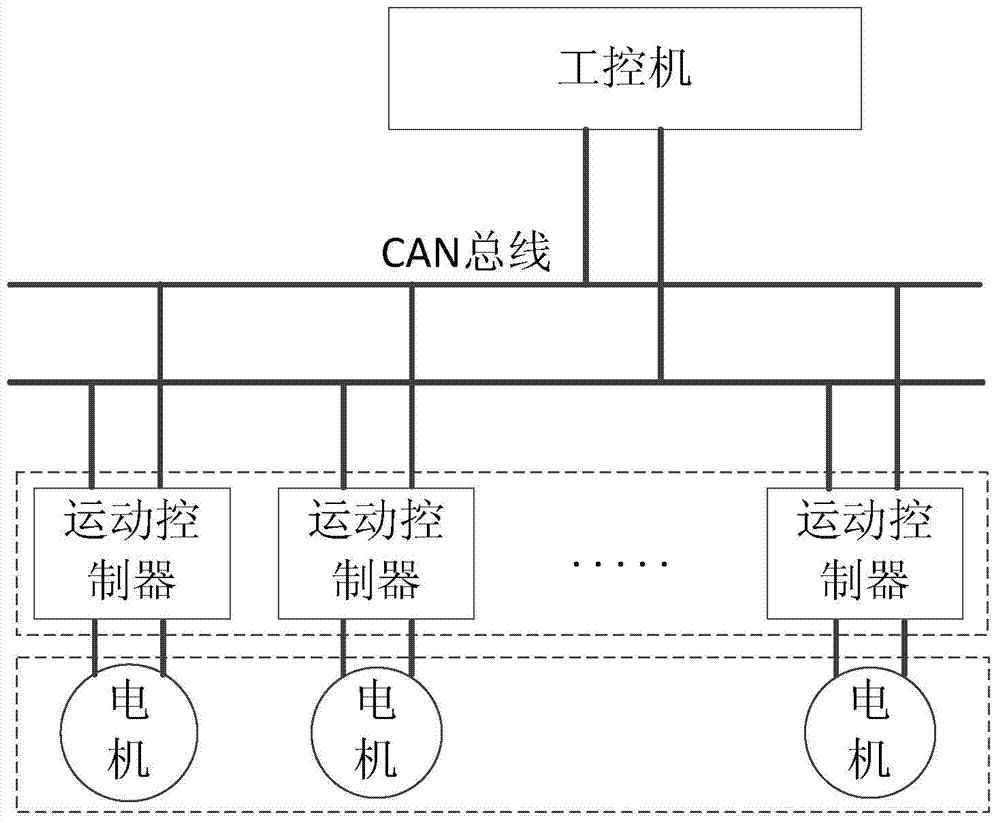
[0018] The invention provides a multi-axis motor synchronous control method, combining figure 1 As shown, it includes the following steps:
[0019] The industrial computer converts the motion trajectory of the robot into the motion target trajectory corresponding to a plurality of motors, and then the industrial computer transmits the motion target trajectory of each motor to the corresponding motion controller through the CAN bus, and the corresponding motion controller controls the motion of the corresponding motor, so tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More