

Fast Torque Tracking Control Strategy
A tracking control and torque technology, applied in the estimation/correction of motor parameters, etc., can solve the problems of slow dynamic response and large steady-state error, and achieve the effect of fast and accurate tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
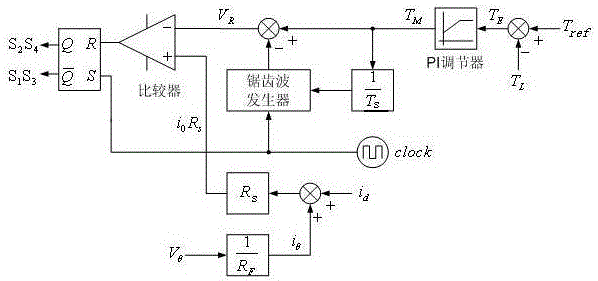
[0014] The present invention will be further described below in conjunction with accompanying drawing:
[0015] Such as figure 1 As shown, this fast torque tracking control strategy is completed through the control circuit. The control circuit includes a PI regulator, a sawtooth wave generator, a clock circuit, a comparator, an RS flip-flop, an adder, and two input terminals of the adder. One input terminal receives the servo position signal converted by the conversion circuit, and the other input terminal receives the signal from the current sampling circuit. After the output terminal of the adder passes through the sampling resistor, it is connected to the same input terminal of the comparator as a comparison The same direction input signal of the torque sensor; the output signal of the torque sensor is compared with the torque given signal, the output end of the subtractor is connected to the PI regulator, and the output end of the PI regulator is connected to the input end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More