A method for determining the trajectory of the patroller's heading and in-position control
A determination method and patrol technology, applied in three-dimensional position/channel control and other directions, can solve the problem of not considering the heading problem, and achieve the effect of increasing the control complexity, smoothing the trajectory motion, and reducing the detection efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
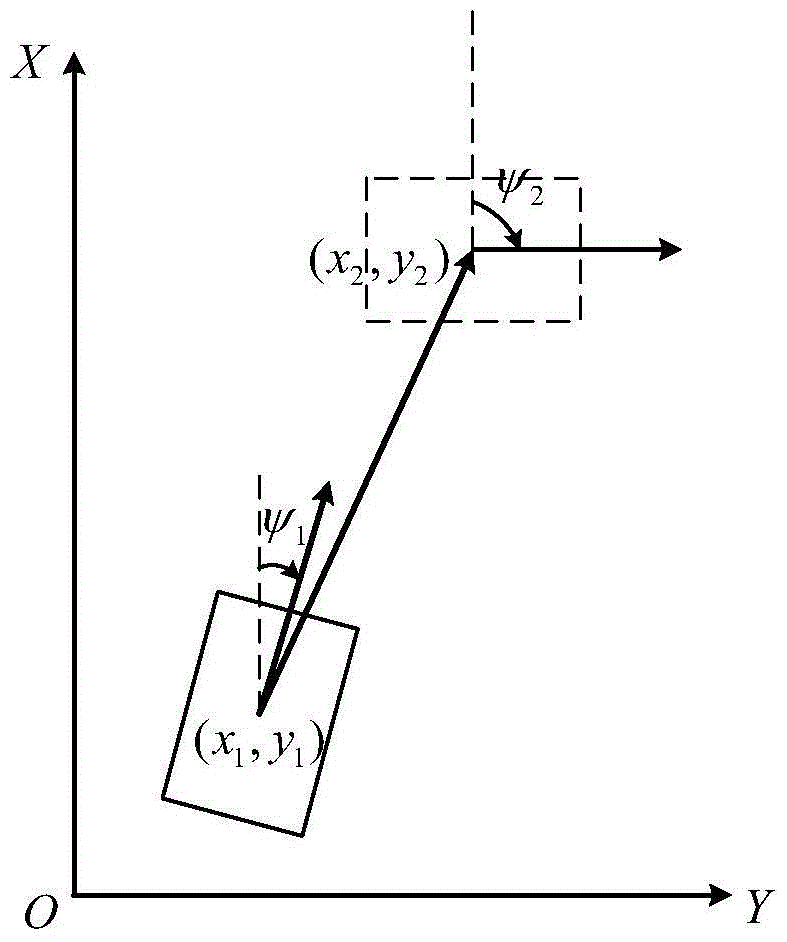
[0028] The starting point and heading of the patrol are known as (x 1 ,y 1 ,ψ 1 )=(0,0,0°), the position and course of the target point are (x 2 ,y 2 ,ψ 2 )=(-1,5,30°). To determine the desired trajectory of the patroller, the steps are as follows:
[0029] (1) Calculate boundary curvature
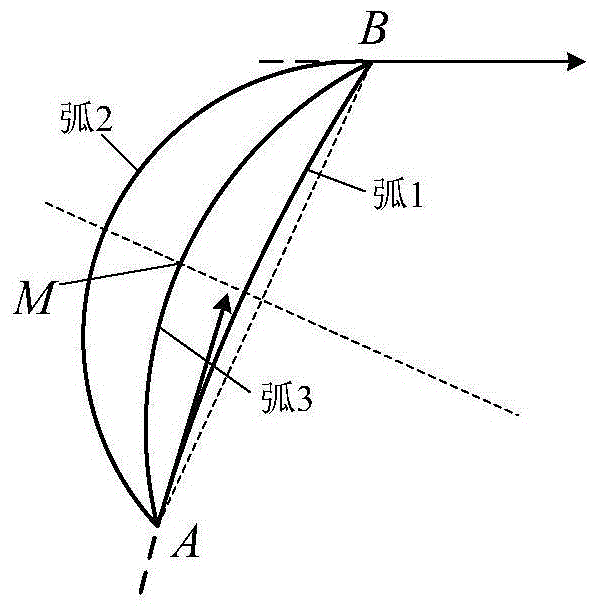
[0030] Note that the current point of the inspector is point A, and the target point is point B.
[0031] Make an arc through two points A and B, make it tangent to the yaw direction of point A, record it as arc 1, corresponding to curvature C A is -0.0769; make an arc through two points A and B, make it tangent to the yaw direction of point B, record it as arc 2, corresponding to curvature C B is 0.2589.
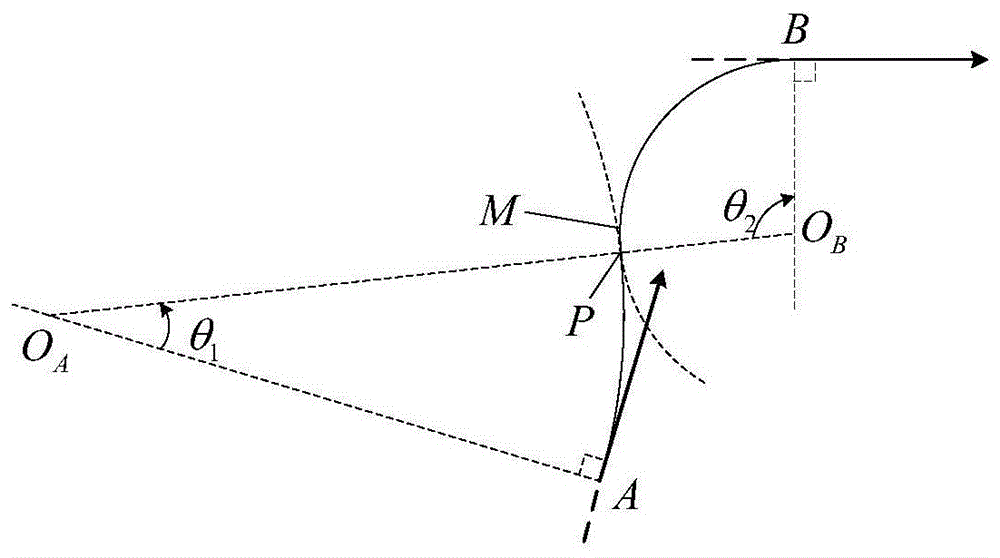
[0032] (2) Determine the midway point M of the trajectory
[0033] Draw an arc through two points A and B, curvature C M is 0.0910, which ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More