

Active mobile vehicle bottom dangerous goods detection device based on deep learning algorithm
A deep learning and detection device technology, which is applied in calculation, geophysical measurement, computer parts, etc., can solve the problems of large under-vehicle images, fatigue, inaccurate positioning, etc., and achieve the effect of comprehensive detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
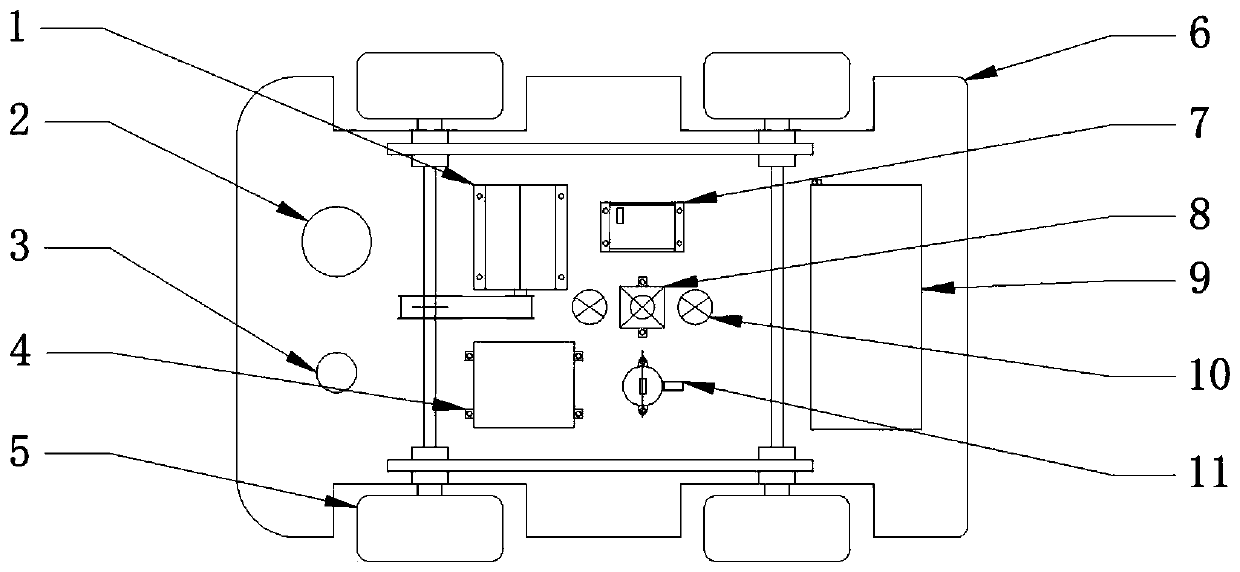
[0071] This embodiment is based on the deep learning algorithm of the active mobile bottom dangerous goods detection device, including the bottom information collection equipment and industrial computer, the overall structure of the information collection equipment is arranged as follows figure 1 As shown, it consists of a mobile platform and various sensors.
[0072] The mobile platform is composed of motor 1, wheels 5, body 6, motion controller 4, infrared wireless module 3, battery 9, remote control and so on. The battery 9, the motor 1 and the unmarked transmission speed change mechanism and the steering mechanism together constitute the power system of the mobile platform, the battery supplies power to the system, and the motor provides power to the system. The motion controller 4 mainly controls the motor 1, the transmission mechanism and the steering mechanism by processing the remote control commands received by the infrared wireless module 3, so as to realize actions ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More