

Circular orbit robot for nondestructive testing of large workpiece
A non-destructive testing and circular track technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of low detection efficiency, large personnel occupation, low degree of automation, etc., and achieve the effect of low detection efficiency, low degree of automation and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to better explain the present invention and facilitate the understanding of the technical solutions of the present invention, typical but non-limiting examples of the present invention are as follows.
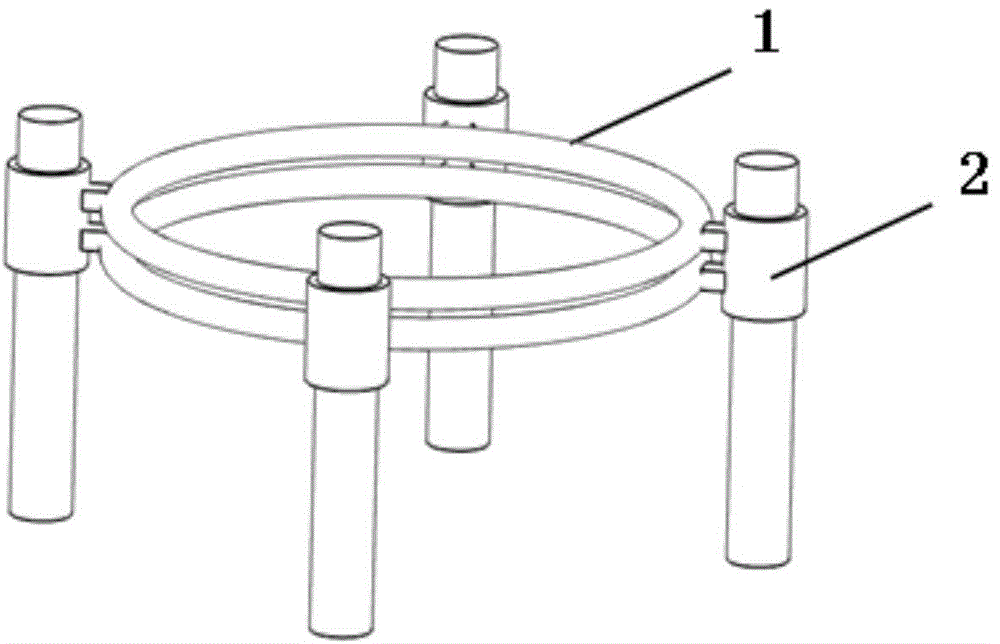
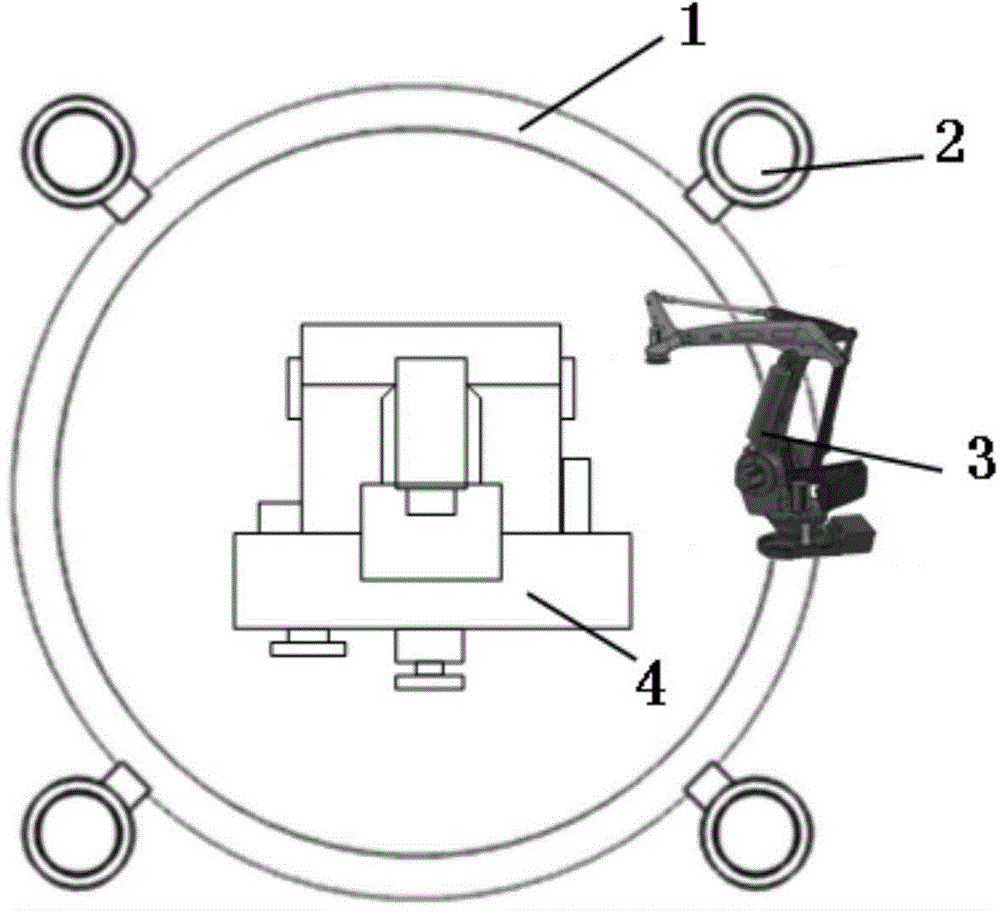
[0018] With reference to the figure, a circular orbital robot for non-destructive testing of large workpieces mentioned in the content of the present invention is described in conjunction with the figure, which is used for non-destructive testing of large steel castings.
[0019] The size of the workpiece is about 2×2×1m. There are 4 columns with a diameter of 0.1m and a height of 2.5m. The circular track has a diameter of 3m.
[0020] The robot body uses Nazhi SRA100 robot with a maximum working radius of 2.6m, a maximum load of 100kg, and a repeat positioning accuracy of 0.1mm. The control system adopts Japanese OTC (Oudish) FD11 control system.
[0021] The non-destructive testing equipment used is a combination of radiographic testing (RT) and ultrasoni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More