

Dual-metamorphism multi-closed-chain connecting rod controllable excavating mechanism with 4R-5R big arm tilting mechanism
A technology of swing mechanism and connecting rod, which is applied to mechanically driven excavators/dredgers, etc., can solve the problems of reducing the number of active rods used, high maintenance costs, and high hydraulic components costs, and achieves flexible and changeable driving modes. Cost, easy remote control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
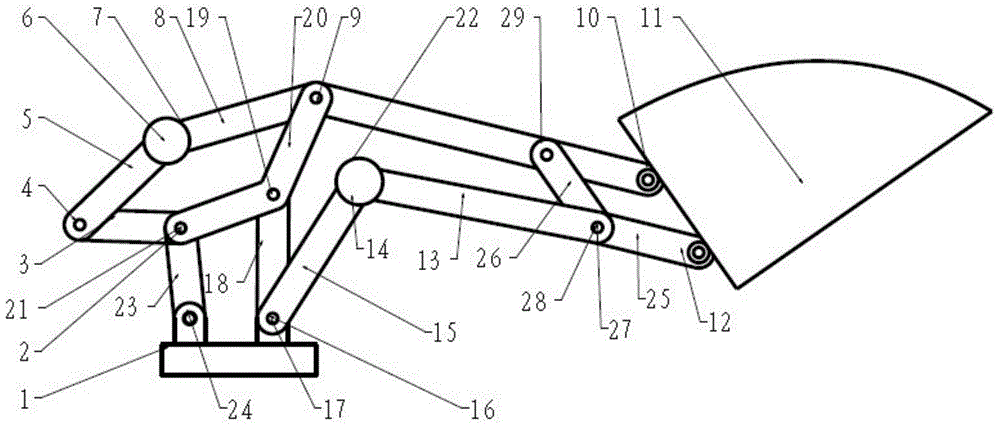
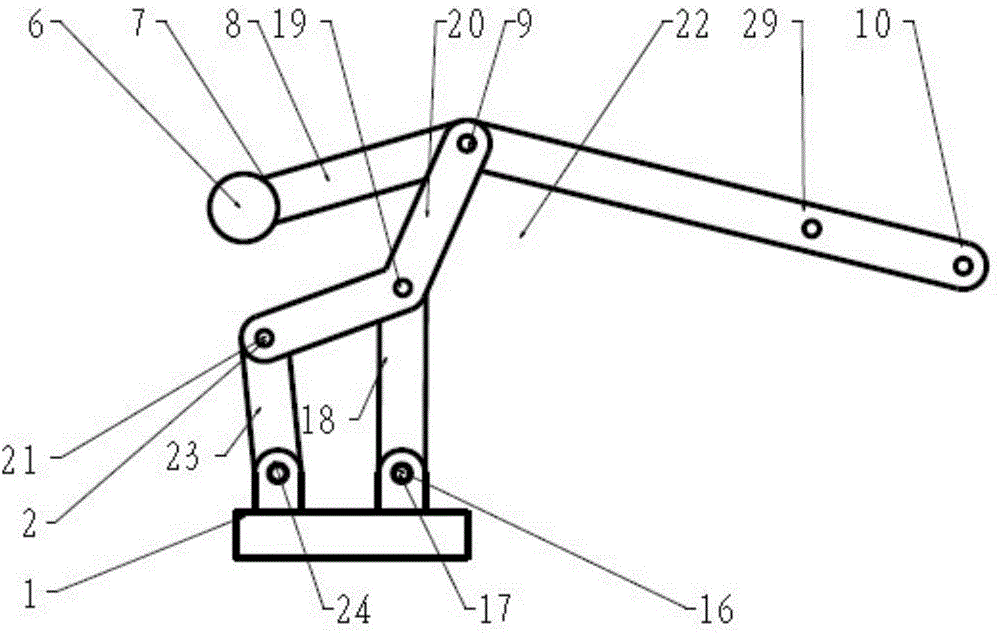
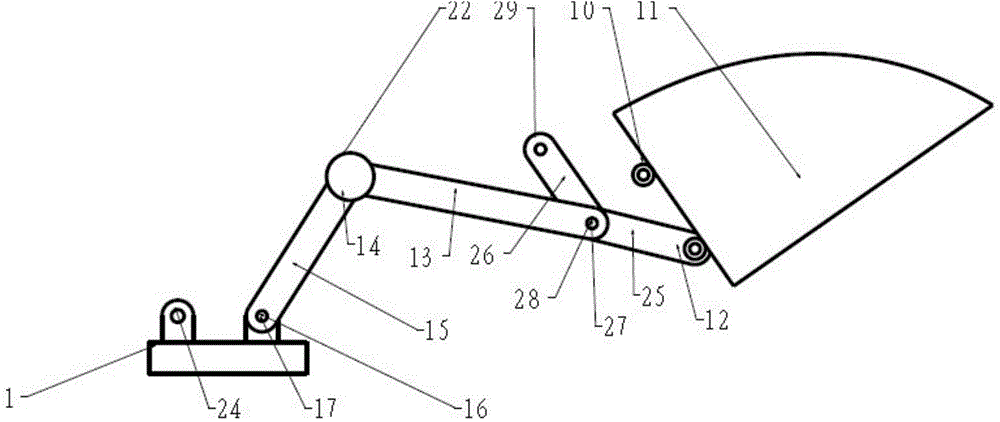
[0021] control figure 1 , a double variable cell multi-closed chain link controllable excavation mechanism containing a 4R-5R boom swing mechanism according to the present invention, including a frame 1, a boom swing mechanism, a stick lifting mechanism, and a bucket turning mechanism And the first electromagnetic locking device 7 and the second electromagnetic locking device 22 . The specific structure and connection method are:
[0022] control figure 1 and figure 2 , the boom swing mechanism is composed of a boom 8, a first connecting rod 23, a second connecting rod 18 and a third connecting rod 20, the first connecting rod 23 is connected with the frame 1 through a first rotating pair 24, The second connecting rod 18 is connected with the frame 1 through the second rotating pair 17, the other end of the first connecting rod 23 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More