

Control method of excavator working device rotation
A technology of working device and control method, which is applied in the direction of mechanically driven excavators/dredgers, etc., can solve problems such as poor control effect and jitter, and achieve the effects of overcoming jitter phenomenon, stable rotation control, and good braking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in further detail below in conjunction with accompanying drawing embodiment:
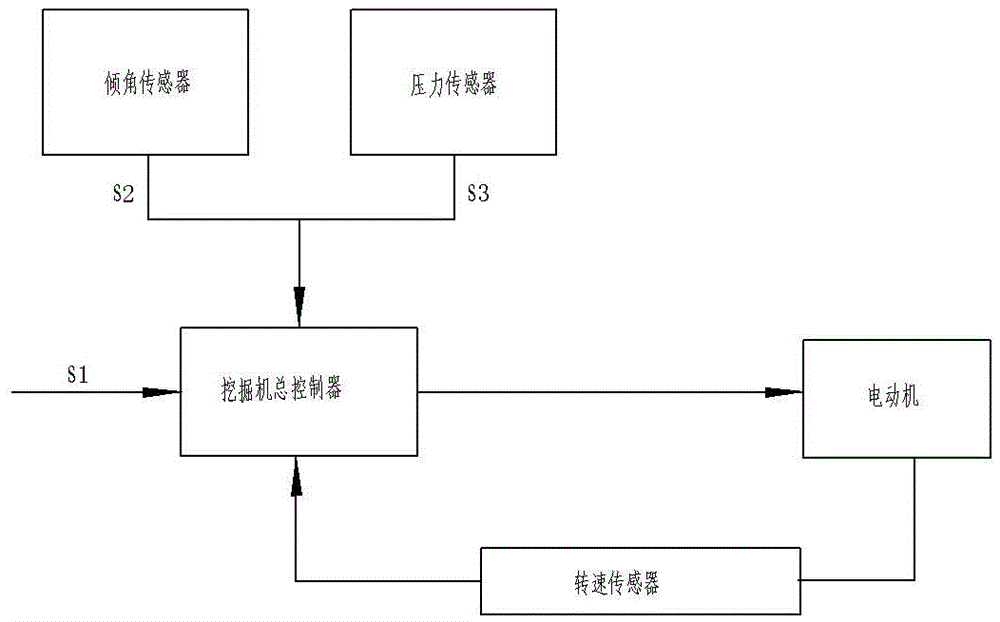
[0014] figure 1 In the control method for the rotation of the working device of the excavator shown, three-way inclination sensors are installed at the working device of the excavator, and two-way pressure sensors are set at the bucket oil cylinder, and these sensors are connected with the general controller of the excavator; When the excavator rotates, the control signal S1 of the target speed of the excavator master controller is input through the displacement stroke of the operating handle, and at the same time, the signal S2 detected by the inclination sensor and the signal S3 detected by the pressure sensor are transmitted to the excavator master controller; The general controller of the excavator calculates the total moment of inertia of the excavator according to the control signal of the target speed and the real-time information of these sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More