

Connecting rod and synchronous belt combined transmission four-degree-of-freedom robot
A timing belt and robot technology, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large space occupied by DELTA robots and heavy structure of SCARA robots, and achieve convenient debugging and disassembly, compact structure, and convenient maintenance and repair. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
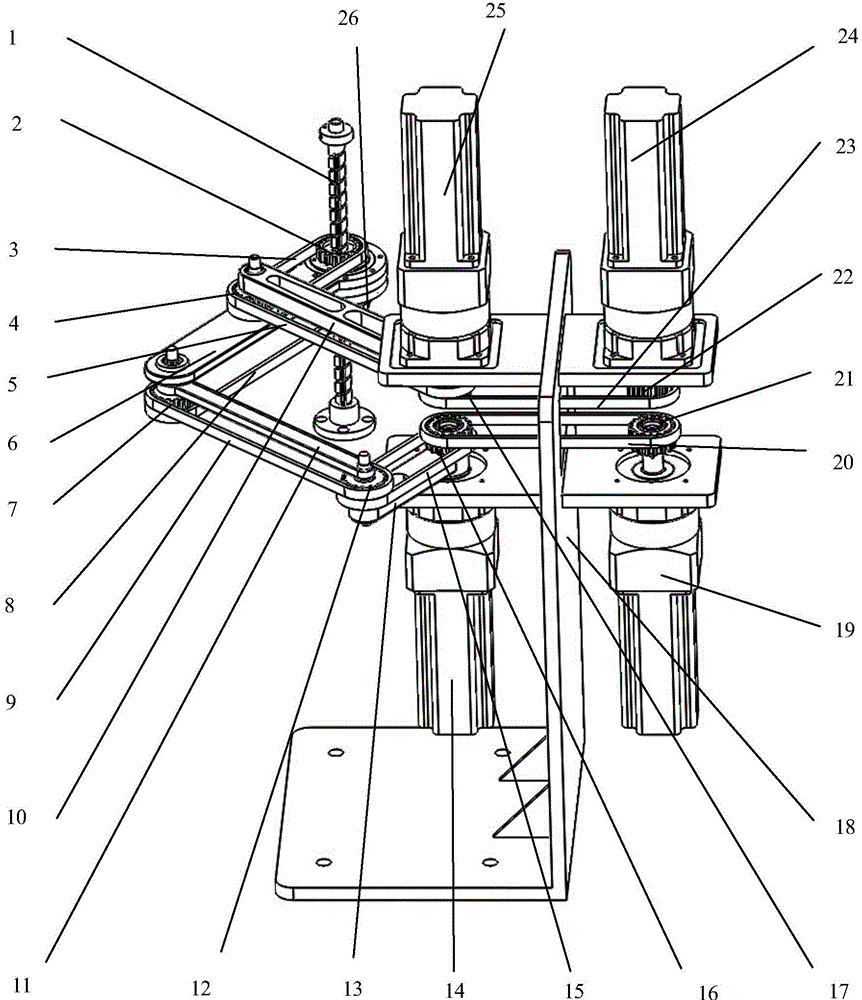
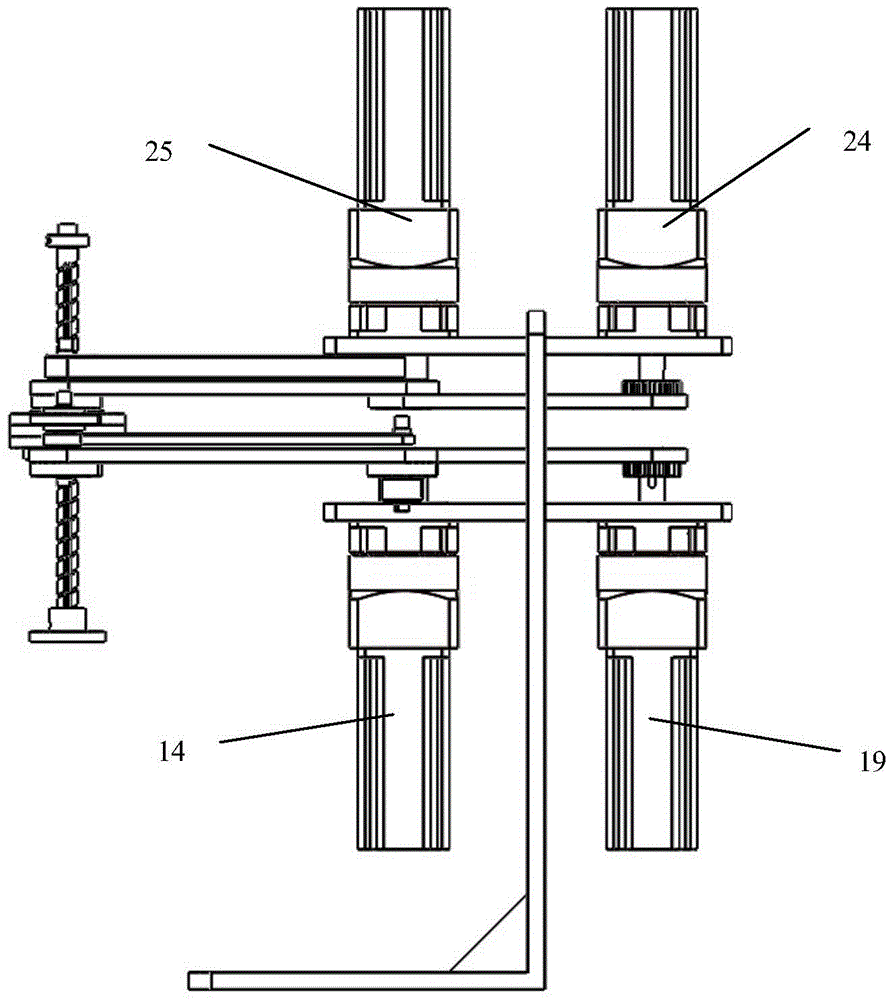
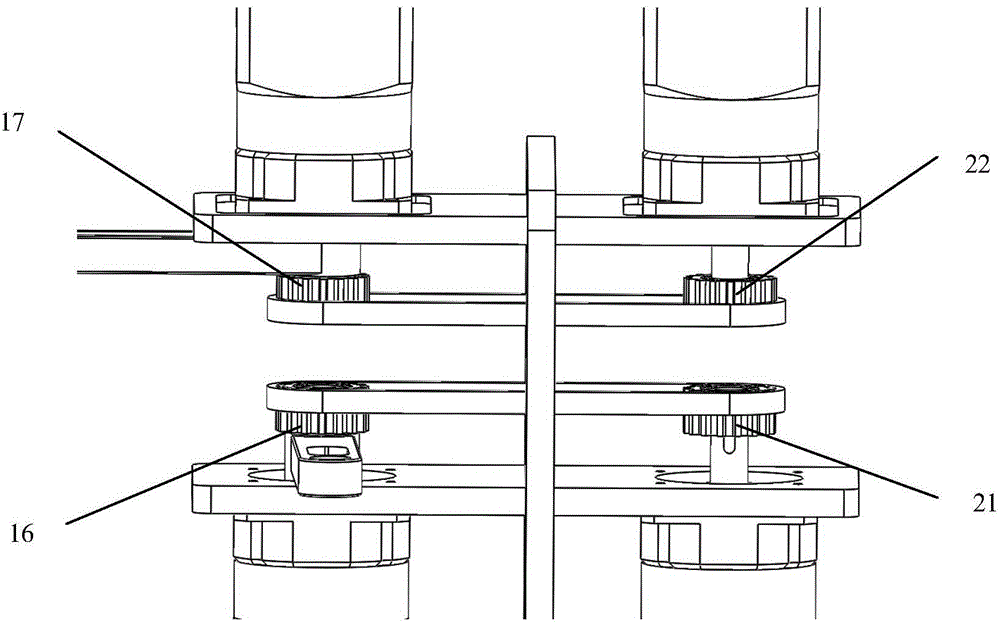
[0027] Such as figure 1 As shown, a four-degree-of-freedom robot of a connecting rod-synchronous belt combined transmission provided by the present invention includes a frame 18, an end effector 1 (a spline ball screw, including a bracket 1-2, a screw nut 1- 1. Lead screw spline 1-3 and lead screw 1-4), parallelogram four-bar mechanism (respectively comprising first active arm 13, second active arm 10, first driven arm 11 and connecting rod 6), synchronous Pulley and synchronous belt (respectively comprising the first pulley 22, the second pulley 21, the third pulley 17, the fourth pulley 16, the fifth pulley 12, the sixth pulley 7, the seventh pulley 4, The eighth pulley 2 and the ninth pulley 26 and the first synchronous belt 23, the second synchronous belt 20, the third synchronous belt 15, the fourth synchronous belt 9, the fifth synchronous belt 8, the sixth sync...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More