Establishing and interference early warning method for auxiliary assembly safety working space of spacecraft mechanical arm
A technology for safe work and auxiliary assembly, which is applied in the directions of manipulators, program-controlled manipulators, and manufacturing tools to achieve the effect of ensuring safety and flexible application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The method for establishing the safe working space of the manipulator and the interference warning method of the present invention will be further described below in conjunction with the accompanying drawings. This description is only exemplary and is not intended to limit the protection scope of the present invention.
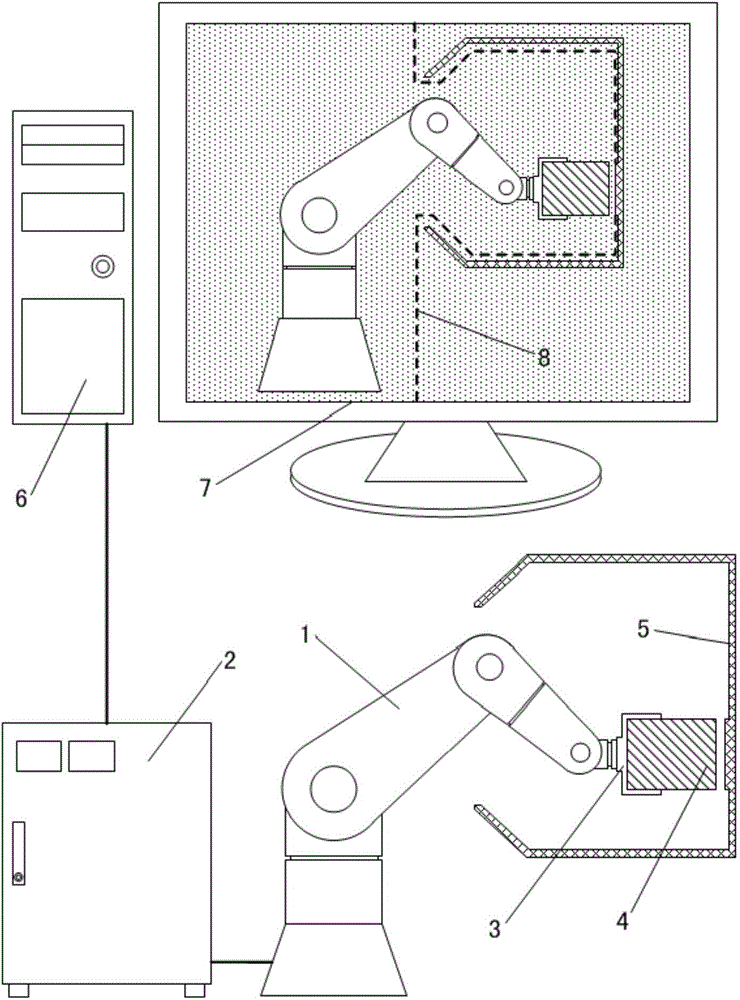
[0024] Such as figure 1 As shown, the mechanical arm 1 moves under the direct control of the mechanical arm controller 2, the clamp 3 is installed at the end of the mechanical arm 1, the workpiece 4 is clamped by the clamp 3, and the mechanical arm 1 drives the workpiece 4 to be transported to the cavity 5 to be assembled. Specify the location for assembly. The computer 6 is electrically connected to the robotic arm controller 2, and the robotic arm controller 2 uploads the state parameters of the mechanical arm movement to the computer 6, and the computer 6 can be used to establish a safe working space and perform interference check calculations, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com