Impedance control method of flexible joint manipulator based on connection and damping configuration
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A flexible joint and impedance control technology, which is applied in the impedance control of flexible joint manipulators and the field of manipulator control, can solve problems such as inability to achieve stable control and large residual vibration, and improve the ability to suppress jitter, low hardware requirements, and design simplified effect
Active Publication Date: 2016-06-22
HARBIN INST OF TECH
View PDF4 Cites 2 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] The purpose of the present invention is to propose a method for impedance control of a flexible joint manipulator based on connection and damping configuration, in order to solve the problem that the traditional manipulator control method in the control of the flexible joint manipulator has large residual vibration and cannot achieve the purpose of stable control
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach 1
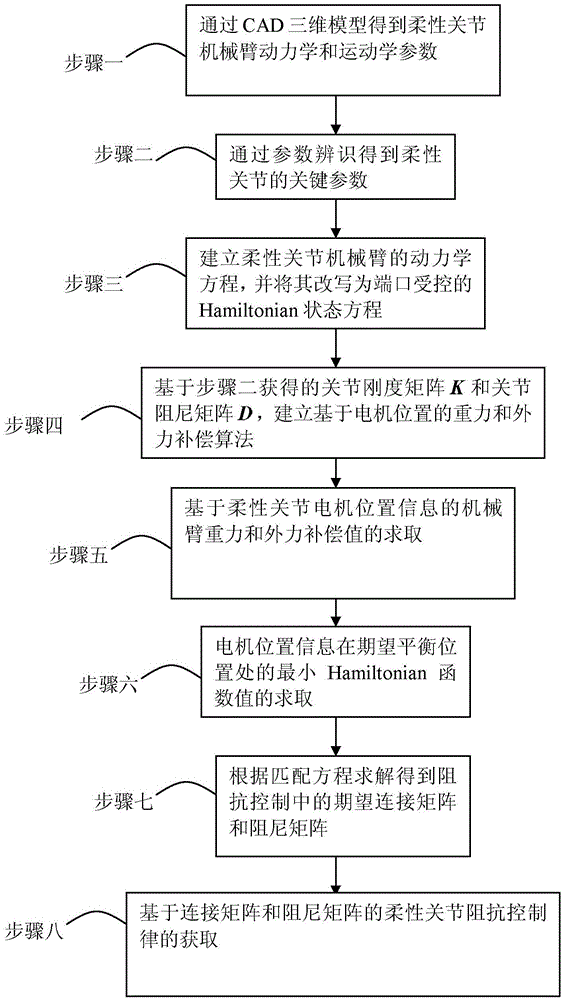
[0030] Embodiment 1: The impedance control method of a flexible joint manipulator based on connection and damping configuration described in this embodiment includes the following steps:
[0031] Step 1. Obtain the dynamics and kinematics parameters of the flexible joint manipulator through the CAD three-dimensional model, including geometric parameters, mass, and moment of inertia;
[0032] Step 2. Obtain the key parameters of the flexible joint through parameter identification, including joint stiffness matrix K, joint damping matrix D, and joint friction torque τ f ;
[0033] Step 3. Establish the dynamic equation of the flexible joint manipulator, and rewrite it as a port-controlled Hamiltonian (portcontrolHamiltonian, PCH) state equation;
[0034] Step 4. Based on the joint stiffness matrix K and joint damping matrix D obtained in step 2, a gravity and external force compensation algorithm based on the motor position is established;
[0035] Step 5. Calculation of the g...
specific Embodiment approach 2
[0039] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the dynamic equation of the flexible joint manipulator described in step 3 is established, and it is rewritten as the Hamiltonian (portcontrolHamiltonian, PCH) state equation controlled by the port. The specific process is:
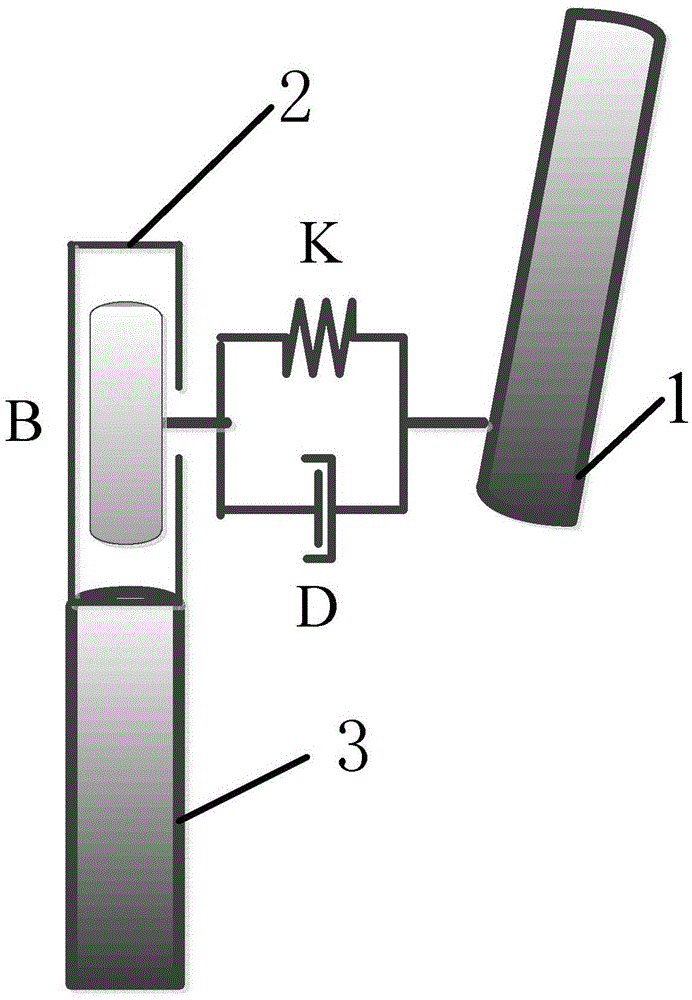
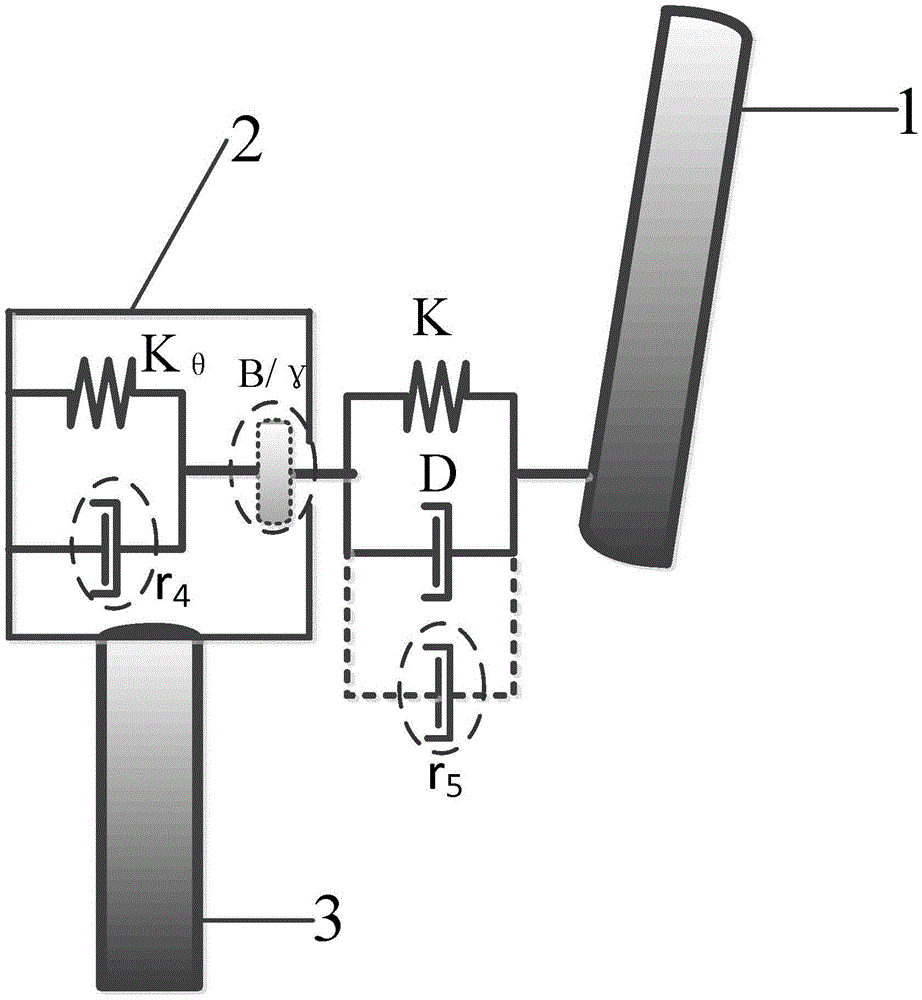
[0040] The dynamic equation of the flexible joint manipulator based on the spring damping model is:
[0041] M ( q ) q · · + C ( q , q · ) + g ...
specific Embodiment approach 3
[0077] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that in step 4, based on the joint stiffness matrix K and joint damping matrix D obtained in step 2, a gravity and external force compensation algorithm based on the motor position is established, The specific process is as follows:
[0078] F τ = F g ( x ) + Λ ( x ) x · · d + μ ( x , x · ) x · - Λ ( x ) Λ x - 1 ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention provides an impedance control method for a flexibility joint mechanical arm based on a connection and damping configuration, and belongs to the technical field of robot controlling. The problem in a traditional mechanical arm control method that during the flexibility joint mechanical arm control process, due to the fact that the residual oscillation is large, the aim of stable control cannot be achieved is solved. The technical points are that according to a CAD three-dimensional model, a kinetic parameter and a kinematic parameter of the flexibility joint mechanical arm are obtained; according to the parameter identification, a key parameter of a flexibility joint is obtained; a kinetic equation of the flexibility joint mechanical arm is established; a gravity compensation algorithm and an external force compensation algorithm based on the motor position are established; a gravity compensation value and an external force compensation value of the mechanical arm are calculated and obtained; a minimum Hamiltonian function value on the expectation balance position of motor position information is calculated and obtained; an expectation connection matrix and a damping matrix in the impedance control are calculated; an impedance control rule of the flexibility joint based on the connection matrix and the damping matrix are obtained. The impedance control method for the flexibility joint mechanical arm based on the connection and the damping configuration can be used for controlling service robots, medical robots and space robots.
Description
technical field [0001] The invention relates to a control method of a manipulator, in particular to an impedance control method of a flexible joint manipulator based on connection and damping configuration, and belongs to the technical field of robot control. Background technique [0002] With the aging of the population and the shortage of labor resources and other phenomena, there is an urgent need for robotic arms to replace humans to perform some operations. In recent years, with the rapid development of robotic arm technology, miniaturized and lightweight robotic arms have been gradually used in advanced service fields, such as space exploration, medical and service industries. Compared with industrial robotic arms, this type of robotic arm has higher requirements for dexterity and safety, which are mainly reflected in: light weight, high load / weight ratio, rich sensory systems, etc. Harmonic reducers are widely used in the design of light manipulator joints due to the...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More