

Systems and methods for robotic surgery
A technique of surgery and surgical instruments, applied in the field of surgical manipulators, which can solve problems such as collision and undesired
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] I. Overview
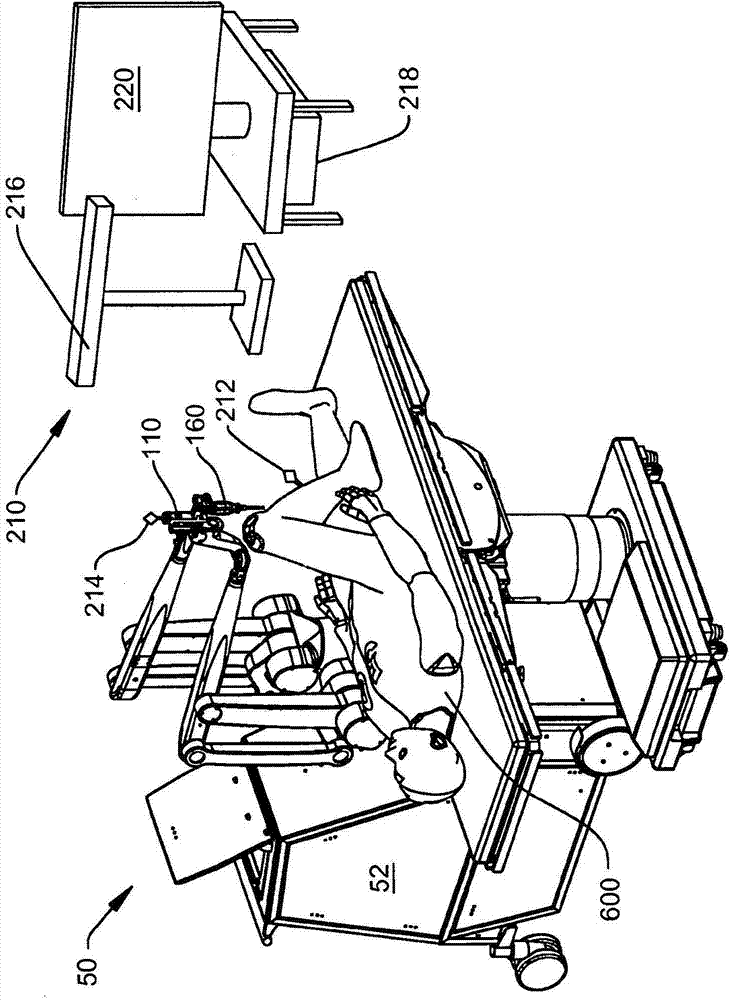
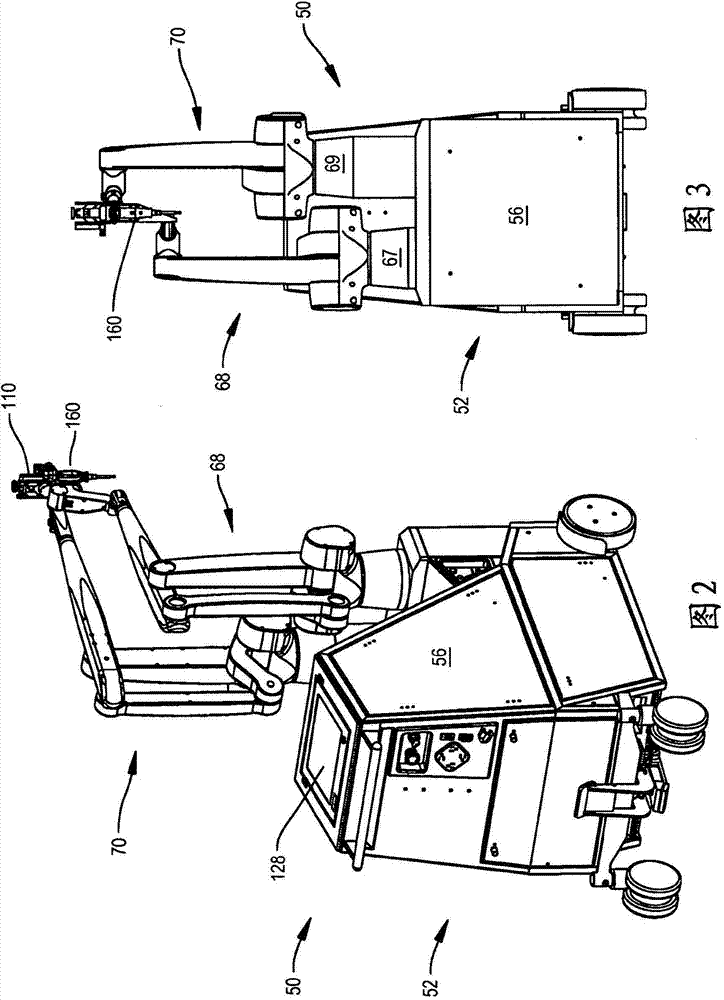
[0060] The present invention relates generally to new and usable surgical manipulators that position surgical instruments or tools in or on a patient. The surgical manipulator positions the surgical instrument so that the end of the instrument that will be applied to the tissue is only applied to the tissue to which the instrument should be applied.
[0061] The manipulator can be operated in manual mode or semi-automatic mode. When the manipulator is operating in manual mode, the manipulator monitors the force and torque that the practitioner applies to the instrument to position the instrument. These forces and torques are measured by sensors, which are part of the manipulator. In response to the force and torque applied by the medical practitioner, the manipulator essentially moves the instrument in real time. Therefore, the movement of the instrument performed by the manipulator can be regarded as the movement of the instrument that simulates the desired...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More