

Novel triangular track type wall climbing robot
A technology of wall-climbing robot and triangular crawler, which is applied in the direction of motor vehicles, transportation and packaging, etc. It can solve problems such as damage, accidents, and unstable crawling, and achieve the effect of good adsorption capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
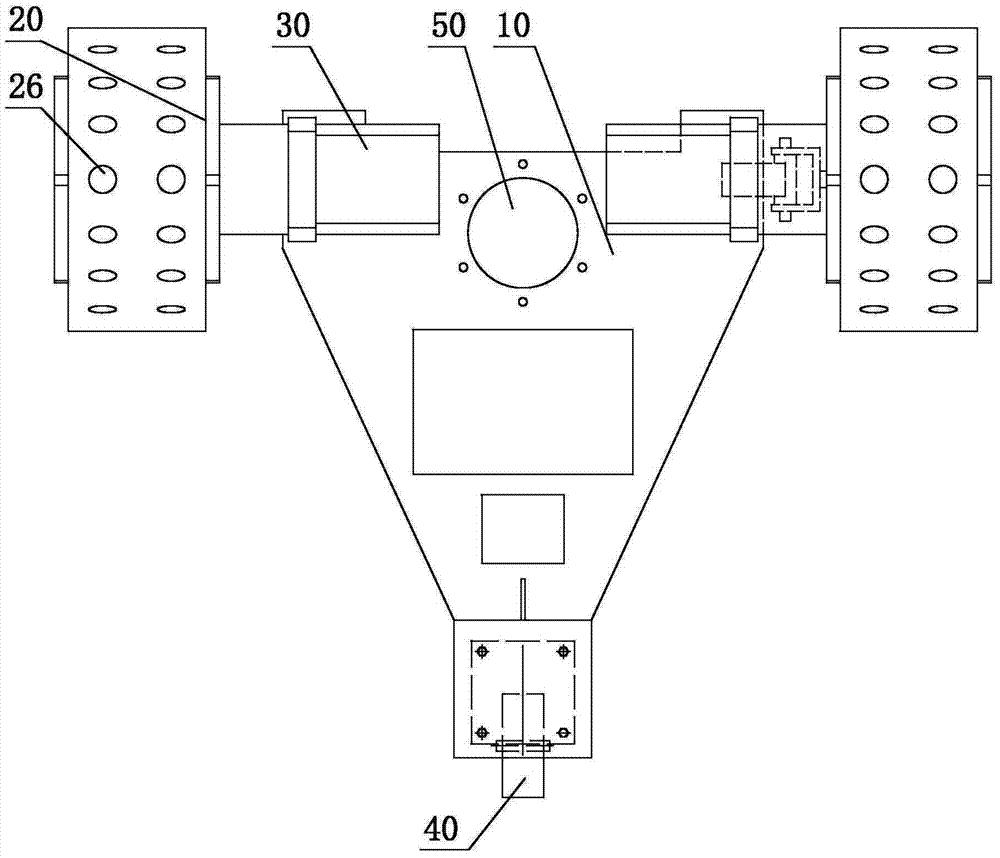
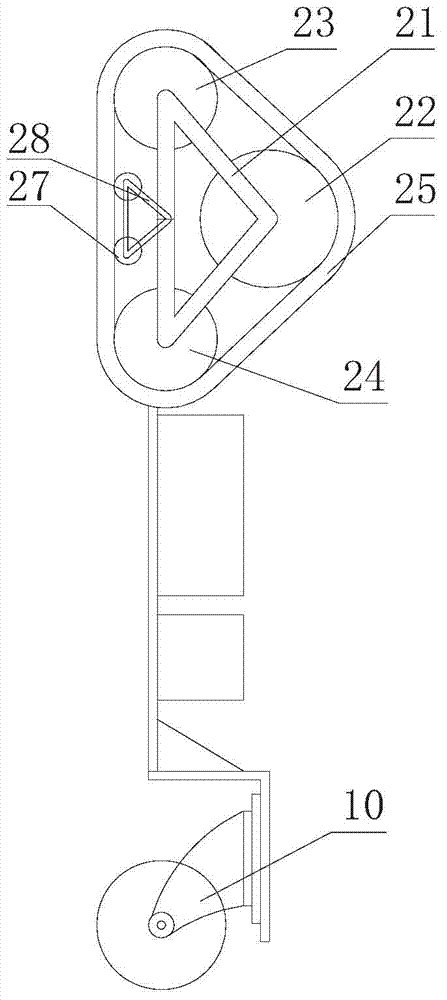
[0023] In order to achieve the purpose of the present invention, as Figure 1 to Figure 2 As shown, a novel triangular crawler-type wall-climbing robot is provided in one of the embodiments of the present invention, including:
[0024] Triangular body 10;
[0025] Two triangular track wheel assemblies 20, which are symmetrically arranged on the two vertices of the triangular vehicle body 10, include a triangular support 21, a driving wheel 22, a guide wheel 23, a tensioning wheel 24, a supporting wheel 27, a triangular support frame 28, Crawler belt 25 and a plurality of magnetic parts 26, triangular support 21 are vertically arranged on the triangular vehicle body 10, driving wheel 22, guide wheel 23, tensioner wheel 24 are respectively arranged on three vertices of triangular support 21 and driving wheel 22 is positioned at Above the guid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More