

Wearable quasi-passive ankle exoskeleton rehabilitation device
A rehabilitation device and ankle joint technology, applied in the field of human-computer interaction, can solve the problems of not fully utilizing the potential energy of human body gravity, high energy consumption, and poor safety, and achieve the effects of avoiding forced driving, saving energy consumption, and being easy to replace
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
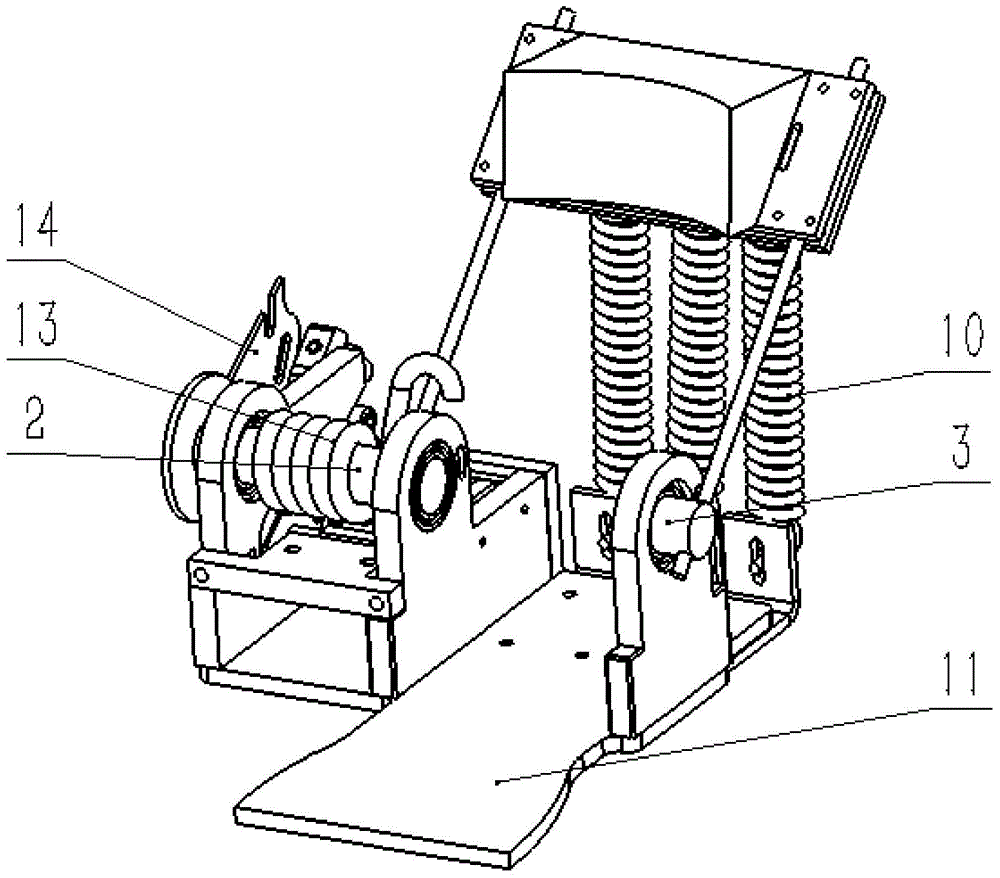
[0027] like figure 1 As shown, the wearable quasi-passive ankle joint exoskeleton rehabilitation device includes a tension spring connection mechanism, a torsion spring 13, a torque compensation mechanism, a guide rail slider transmission mechanism and an electric control braking system; the extension spring connection mechanism and the torsion spring 13 The combination realizes the torque change of the ankle joint during walking, and the electronically controlled braking system, torque compensation mechanism and guide rail slider transmission mechanism realize the non-linear compensation of torque, thereby simulating the torque of the ankle joint when a healthy person walks.
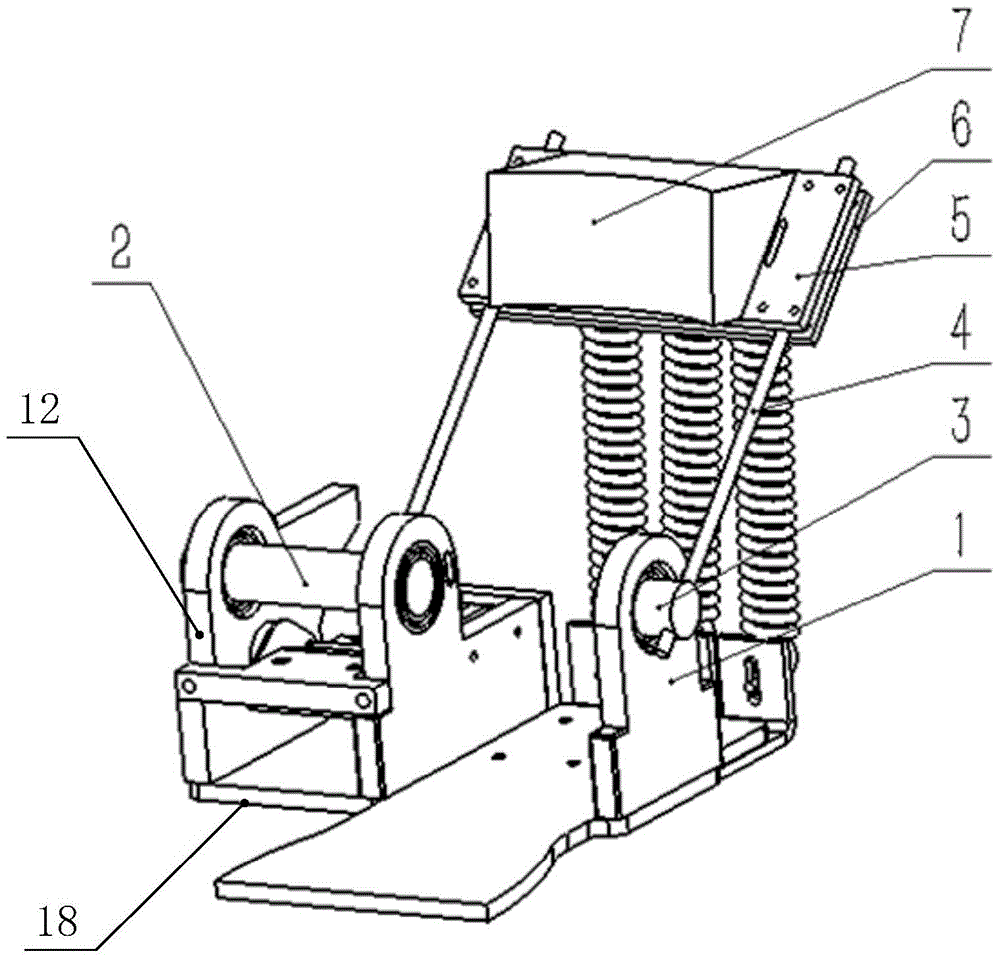
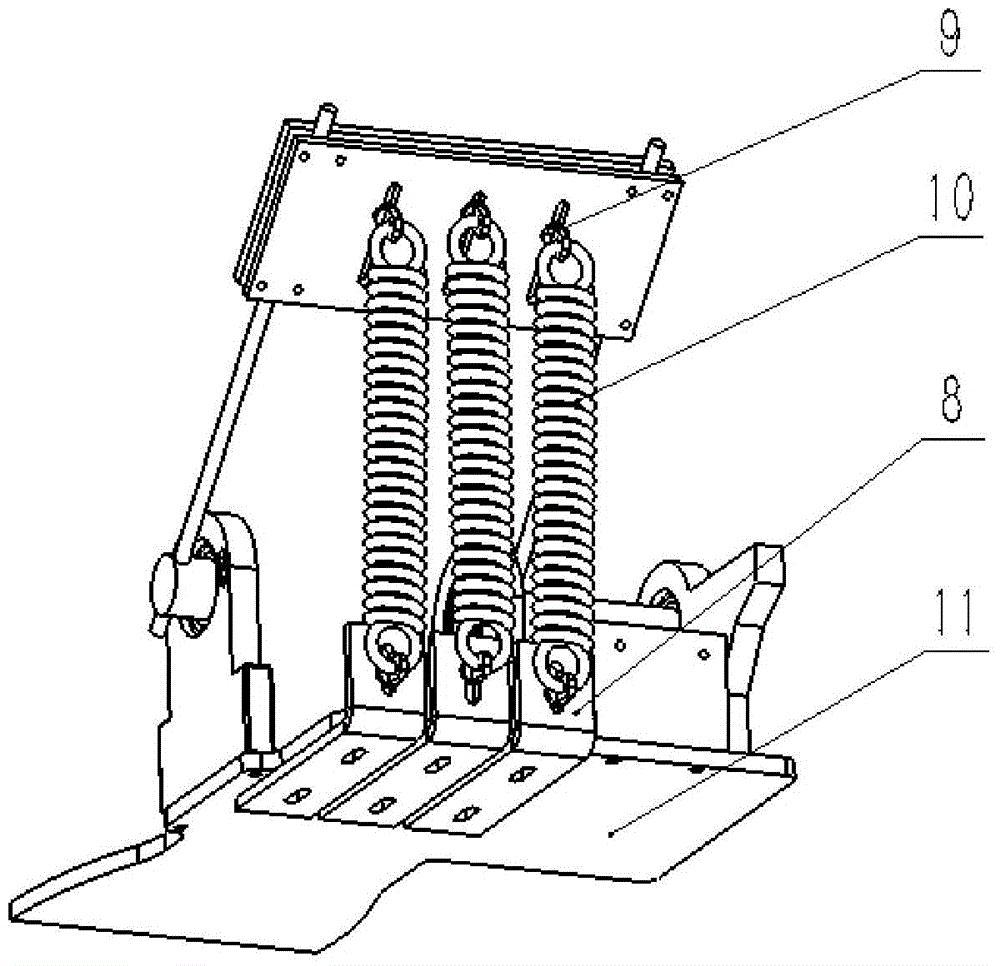
[0028] like diagram 2-1 , 2-2 As shown in and 3, the tension spring connection mechanism includes a foot-shaped bottom plate 11, a convex vertical plate 1, a long main shaft 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More