Three dimensional display method based on augmented reality and augmented reality glasses
An augmented reality and three-dimensional display technology, applied in optics, instruments, electrical components, etc., can solve the problems of poor fusion of virtual reality and other problems, and achieve the effect of easy portability and good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
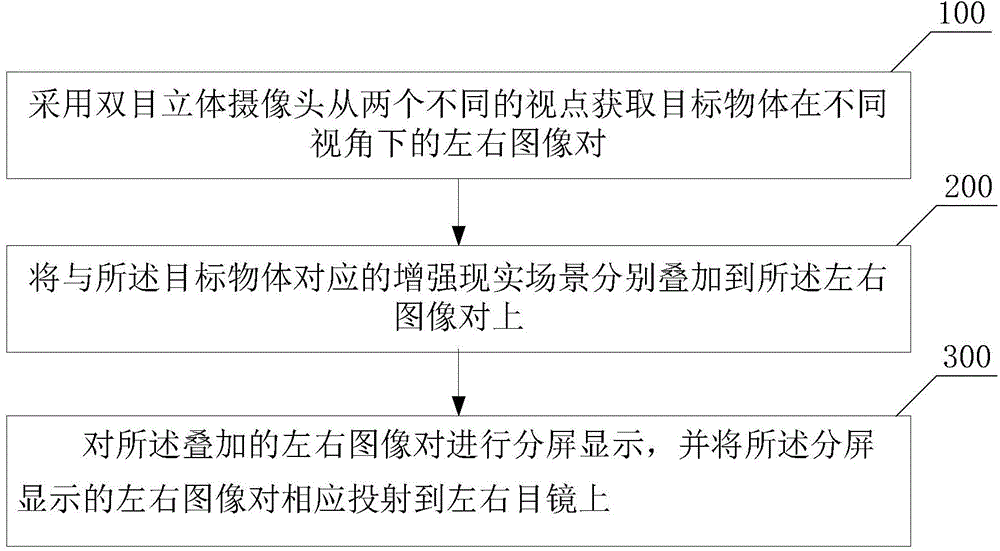
[0045] Such as figure 1 As shown, the first embodiment of the present invention proposes a three-dimensional display method based on augmented reality, and the three-dimensional display method includes:
[0046] Step S100, using a binocular stereo camera to acquire left and right image pairs of the target object under different viewing angles from two different viewpoints.
[0047] Augmented reality glasses use binocular stereo cameras to observe the same target object from two different viewpoints, so as to obtain left and right image pairs of the target object under different viewing angles. Wherein, the pair of left and right images are two mutually independent images collected by the binocular stereo camera from two different viewpoints and with the target object as the foreground. In this embodiment, the left a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



