

Method and system for intelligently reducing speed of grab bucket/carrier loader and lifting-switching mechanism
A technology of opening and closing mechanism and carrier, which is applied in the field of cranes and ship unloaders. It can solve the problems of slow feedback speed, low precision of deceleration system, and low precision, and achieves a wide range of applications.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
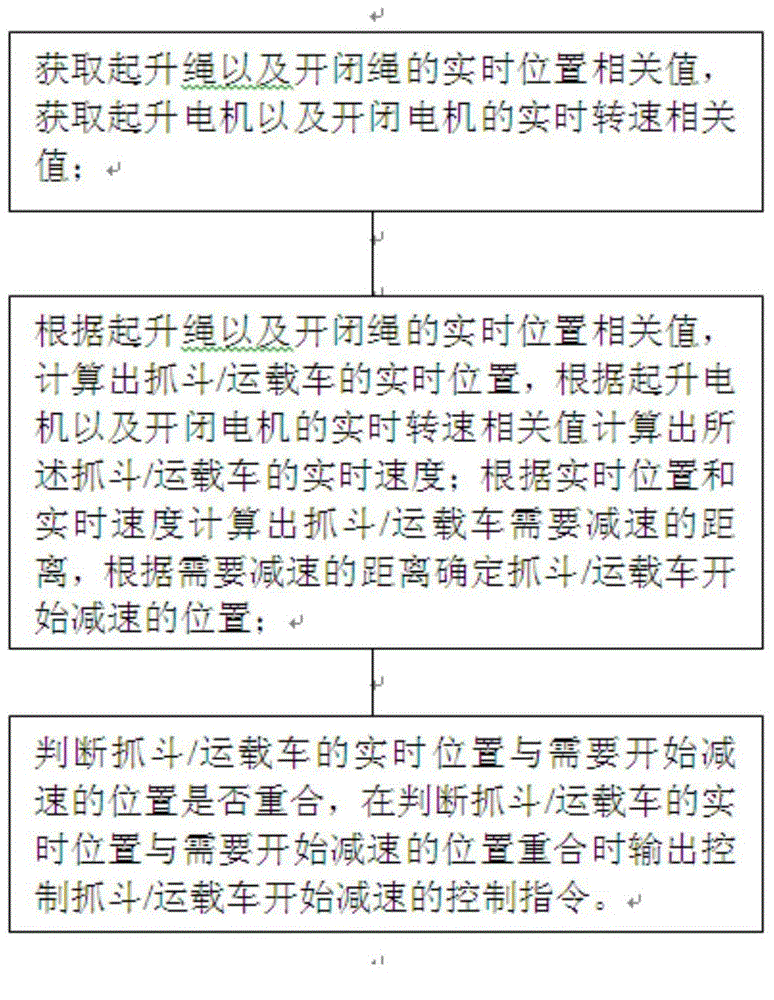
[0063] Such as figure 1 As shown, a method for realizing the intelligent deceleration of the grab bucket / carrier in the lifting opening and closing mechanism includes the following steps:
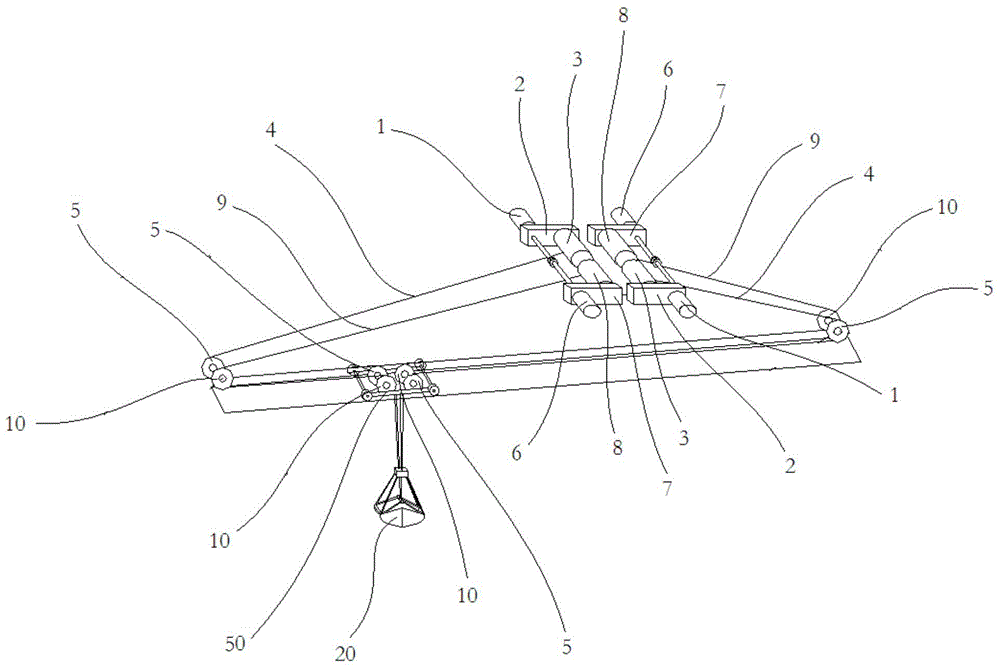
[0064] Obtain the real-time position related values of the hoisting rope 4 and the opening and closing rope 9, and obtain the real-time rotational speed related values of the hoisting motor 1 and the opening and closing motor 6;
[0065] According to the real-time position correlation value of hoisting rope 4 and opening and closing rope 9, calculate the real-time position of grab bucket 20 / carrying vehicle, calculate described grab bucket 20 according to the real-time rotational speed correlation value of hoisting motor 1 and opening and closing motor 6 / The real-time speed of the carrier; calculate the distance that the grab bucket 20 / carrier needs to decelerate according to the real-time position and real-time speed, and determine the position where the grab bucket 20 / carrier starts ...
Embodiment 2
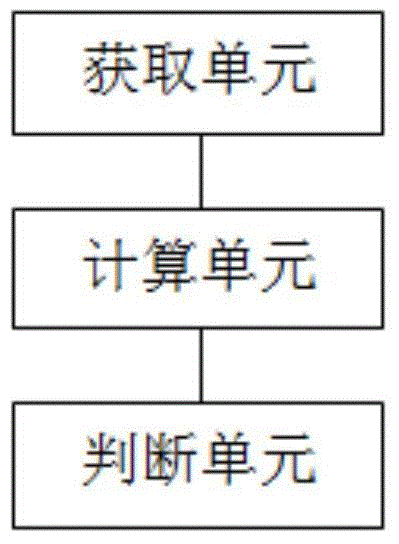
[0087] A system to realize the intelligent deceleration of the grab bucket / carrier in the lifting opening and closing mechanism,
[0088] Such as figure 2 As shown, the acquisition unit is used to acquire the real-time position related values of the hoisting rope 4 and the opening and closing rope 9, and acquire the real-time rotational speed related values of the hoisting motor 1 and the opening and closing motor 6;
[0089] The calculation unit is used to calculate the real-time position of the grab bucket 20 / carrier according to the real-time position related values of the lifting rope 4 and the opening and closing rope 9, and calculate the real-time position of the grab bucket 20 / carrying vehicle according to the real-time rotational speed related values of the lifting motor 1 and the opening and closing motor 6 The real-time speed of the grab bucket 20) / carrier; calculate the distance that the grab bucket 20 / carrier needs to decelerate according to the real-time ...
Embodiment 3
[0100] A system for realizing intelligent deceleration of the grab bucket / carrier in the lifting opening and closing mechanism, including
[0101] A plurality of encoders are used to respectively detect the real-time position related values of each hoisting rope 4 and each opening and closing rope 9, and detect the real-time rotational speed related values of the hoisting motor 1 and the opening and closing motor 6;
[0102] The processor is connected with the encoder, and is used to calculate the real-time position of the hoisting rope 4 and the opening and closing rope 9 according to the real-time position related value, and calculate the hoisting motor 1 and the opening and closing motor 6 according to the real-time rotational speed related value According to the real-time position and real-time speed, calculate the distance that the grab bucket 20 / carrier needs to decelerate, determine the position where the grab bucket 20 / carrier starts to decelerate according to the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More