

Hopping robot mechanism
A robot, single-leg technology, applied in the field of robots, can solve problems such as speed constraints of walking or crawling, and achieve the effects of improving robustness, improving efficiency, and reducing impact damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Further illustrate the present invention below in conjunction with accompanying drawing.
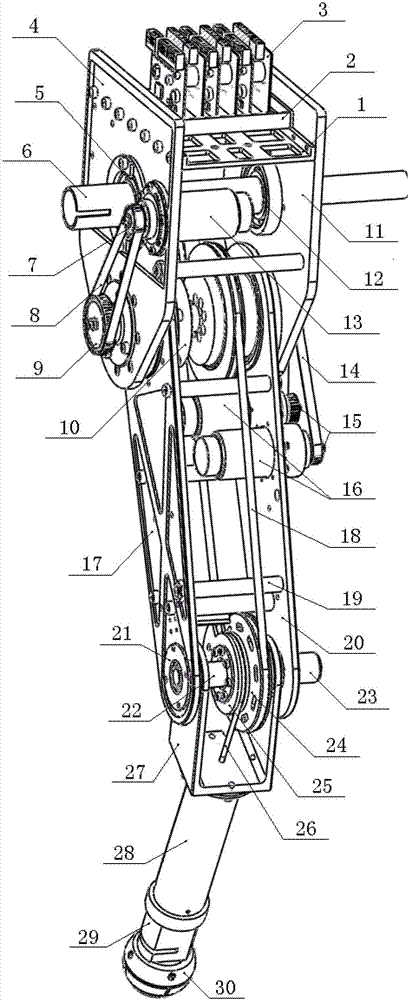
[0015] As shown in the figure, a single-leg jumping robot mechanism of the present invention consists of three parts: a body, a thigh and a calf, the body and the thigh are connected through the hip joint, and the thigh and the calf are connected through the knee joint.
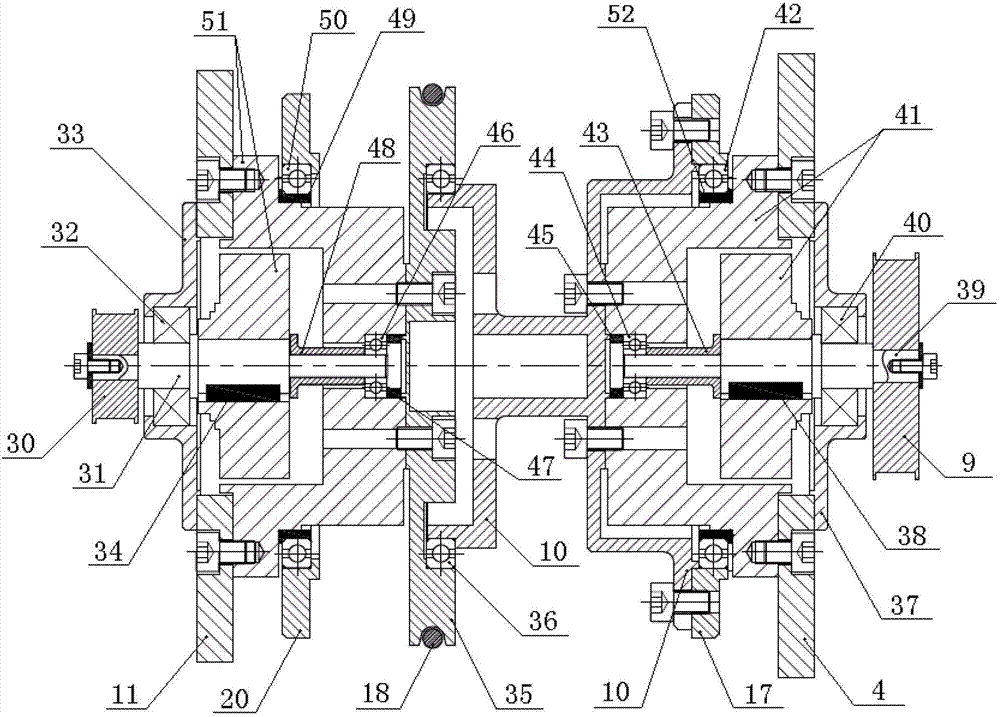
[0016]The body part of the single-leg robot includes the right side plate 4, the left side plate 11, the flat plate 1, the connecting rod 6, the driver 3, the driver seat 2, the hip motor 13, the hip driving wheel 7, the hip timing belt 8, etc. Composition, body right board 4 and body left board 11 are connected by body board 1, driver 3 is installed on the driver seat 4, and is fixed on the body board 1, connecting rod 6 is formed by body right board 4 and body left board 11 is supported by the first bearing 5 of the body and the second bearing 12 of the body. One end of the connecting rod 6 can be connected wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More