Path planning algorithm based on target direction constraint
A technology of path planning and target direction, applied in two-dimensional position/channel control and other directions, it can solve the problems of low search efficiency, large memory resources, and a large number of reserved nodes, so as to improve search efficiency and reduce the occupation of memory resources. , the effect of reducing the search size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
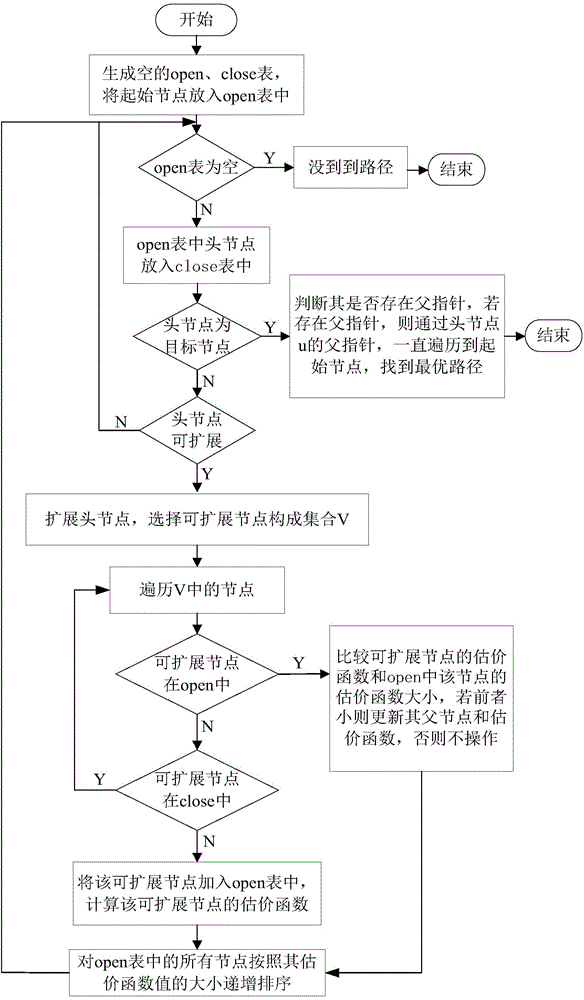
[0038] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
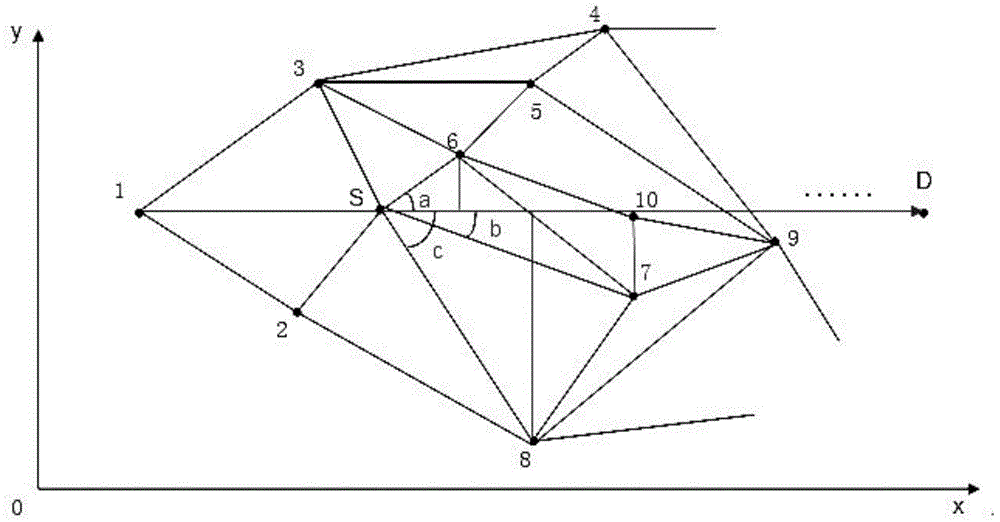
[0039] The path planning algorithm based on the target direction constraint, the algorithm principle of the path planning algorithm based on the target direction constraint is: in the path search process, only the current node (the starting node is the first current node) is kept in the same direction as the target node and add these scalable nodes to the state space of the scalable nodes, evaluate each scalable node in the state space, and obtain the scalable node with the smallest value of the evaluation function as the next current node (as the current node The node of the node is no longer in the state space), repeat the path search until the scalable node with the smallest evaluation function value in the state space is the target node, and the optimal path is obtained.
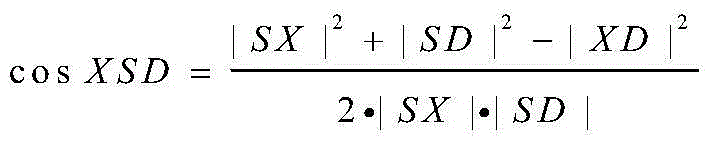
[0040] According to geometry, the straight-line distance between tw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com