

Fixed-dimensionality flying type multi-rotor aircraft and flying control method
A multi-rotor aircraft and flight control technology, applied in the field of unmanned aerial vehicles, can solve problems such as not being able to solve specific needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
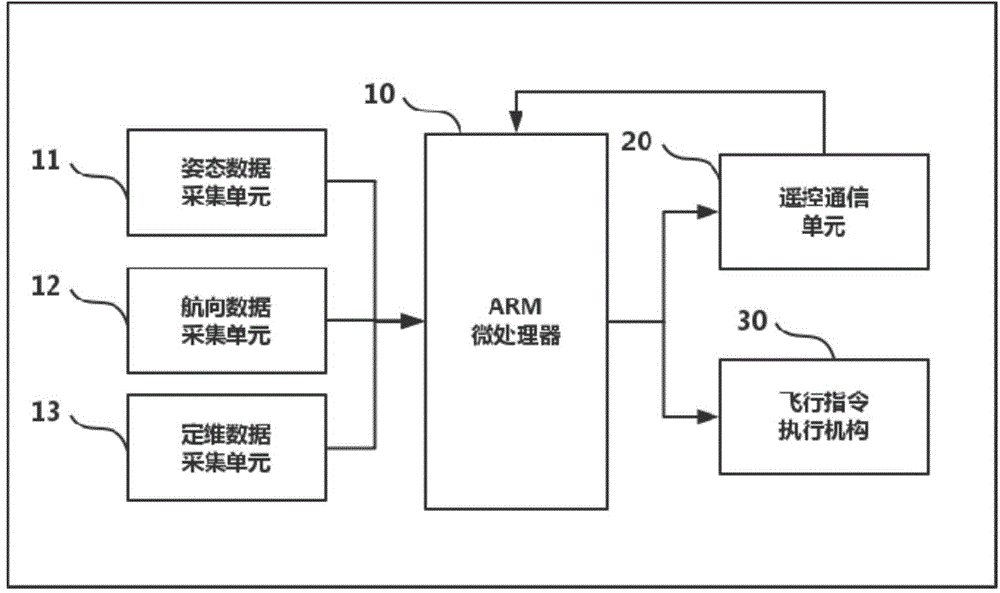
[0049] figure 1 A schematic diagram of the frame structure of the flight control part of the multi-rotor unmanned aerial vehicle according to Embodiment 1 of the present invention is shown. Such as figure 1 As shown, the flight control part includes a microprocessor 10 for completing all flight control signal processing (this application typically takes an ARM microprocessor as an example), and this processor can complete intelligent data processing with a small volume , the microprocessor 10 acquires the data relevant to the flight of the unmanned aerial vehicle from a plurality of data acquisition units, which may commonly include an attitude data acquisition unit 11 about the flight attitude, and a heading data acquisition unit 12 about the flight direction, especially according to The specific needs of the present application also have a fixed-dimensional data acquisition unit 13 for collecting data related to fixed-dimensional control. The fixed-dimensional data acquisit...
Embodiment 2
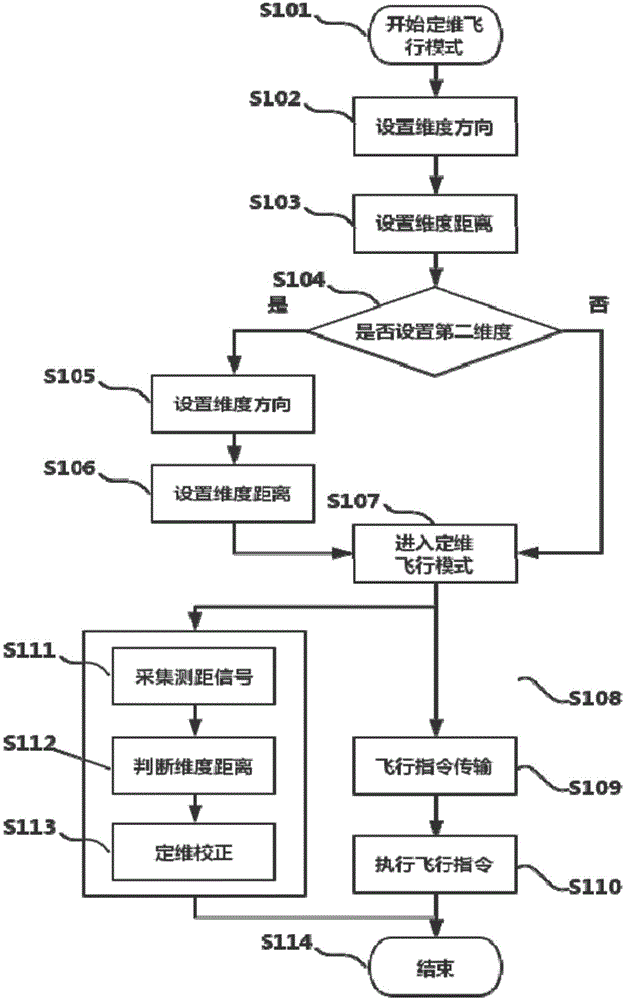
[0091] image 3 A flow chart of a flight control method for a multi-rotor unmanned aerial vehicle according to Embodiment 2 of the present invention is shown. The steps of the flow chart are the same as those in Embodiment 1 of the present invention, and will not be repeated here. Here, the flight mode steps with differences are mainly described as follows:
[0092] In Embodiment 2 of the present invention, step S108 in the original Embodiment 1 is omitted. Although the flight control command from the remote control terminal / ground station may cause the unmanned aerial vehicle to be displaced in the dimension of the intended fixed distance, this This kind of displacement can be corrected by fixed-dimensional correction implemented at the same time.
[0093] In other words, the unmanned aerial vehicle can accept and execute the flight instructions from the remote terminal through its flight controller, but the dimension correction command executed at the same time can eliminat...
Embodiment 3
[0096] Figure 4 A schematic diagram of a frame structure of a multi-rotor unmanned aerial vehicle in the prior art is shown. A common multi-rotor unmanned aerial vehicle basically includes a flight controller 30, a power supply 40, a motor drive unit 50, and a remote control signal receiving unit 60, wherein the flight controller 30 is responsible for the flight control of the unmanned aerial vehicle as the center, and the power supply 40 is all The components of the unmanned aerial vehicle provide power, and the motor drive unit 50 generally includes a rotor driven by a motor, and the output power of the motor can be adjusted through an electronic governor. The electronic governor implements different levels of drive to different rotors, which can enable the unmanned aerial vehicle to complete free flight within the space range. In addition, the flight controller 30 is used as the main controller in order to effectively control and manage the flight process of the unmanned ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More