Three-degree-of-freedom wearable ankle rehabilitation medical robot
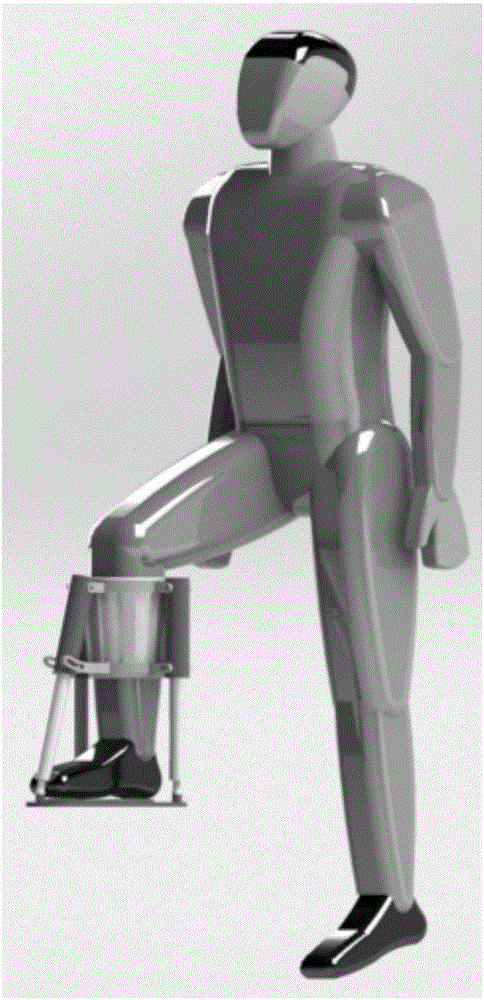
A medical robot and wearable technology, used in physical therapy, passive exercise equipment, etc., can solve the problems of unstable fixation, insufficient ability to simulate the doctor's treatment process, and complex structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0014] Concrete scheme of the present invention:
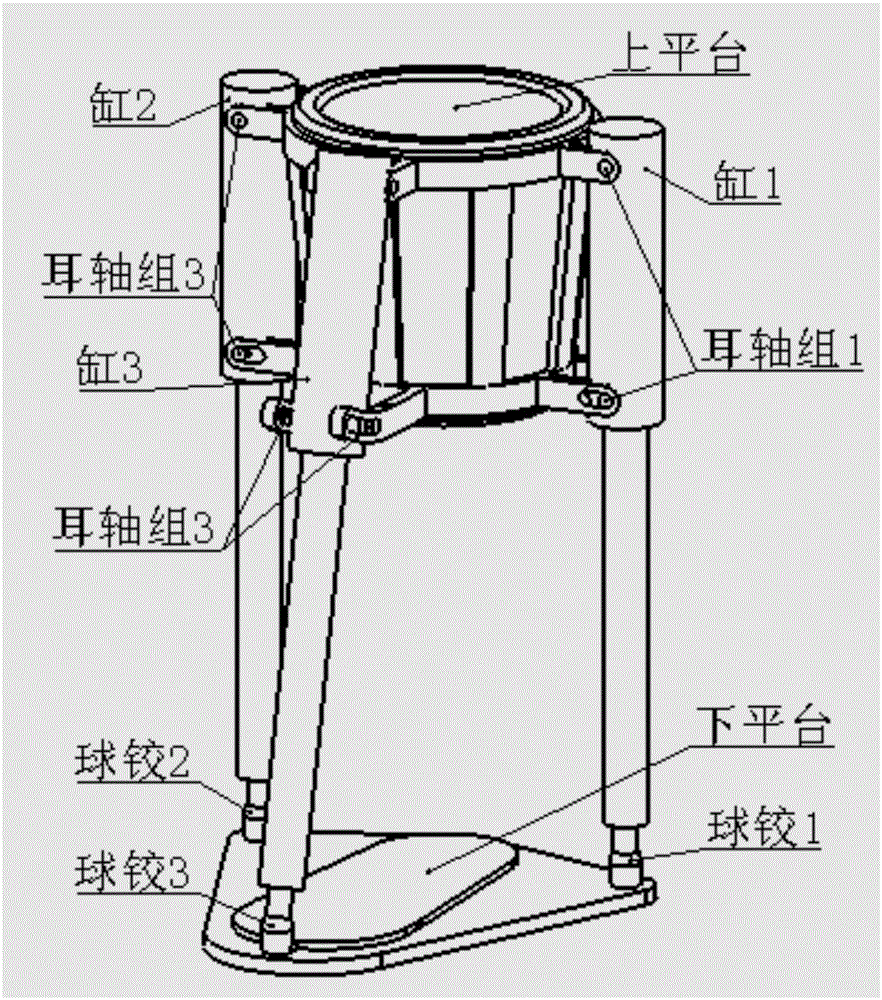
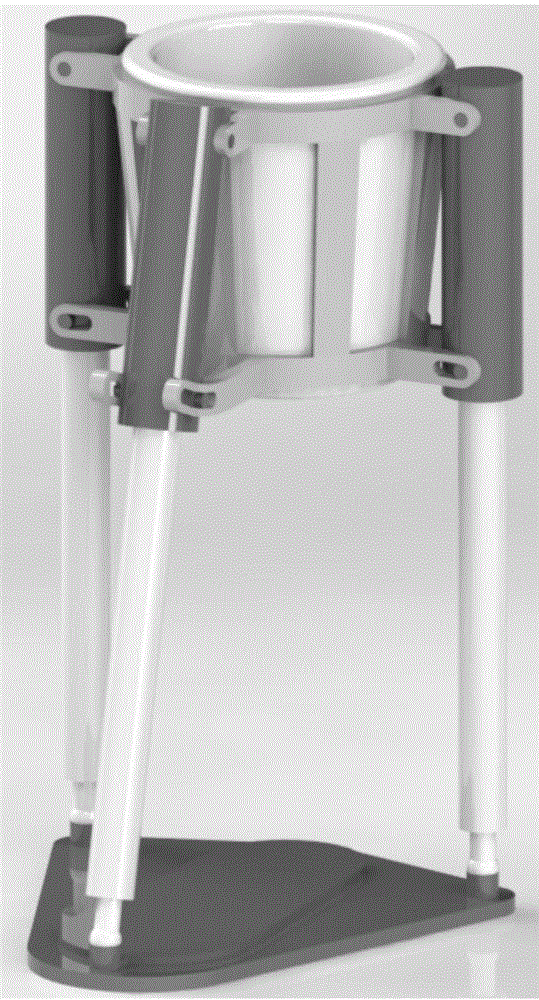
[0015] The upper platform is composed of a central sleeve and an outer rigid structure. The material of the sleeve is soft and elastic, and it is fixed on the patient's leg by wearing it. The upper platform and the cylinder of each cylinder are connected by 2 trunnions, and the three cylinders are located on the left side, right side and front side of the upper platform respectively, and are distributed around the center of the upper platform at an interval of 90°; the upper trunnion is connected to the pin hole As a revolving pair, the lower trunnion limits the rotation angle in the arc notch, wherein the left and right sides limit the rotation of about 5°, and the front side limits the rotation of about 15°.
[0016] The lower platform is connected to the lower platform with one end of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com