

Multi-mode compliance training method for ankle rehabilitation robot on basis of admittance model
A rehabilitation robot and training method technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems such as the inability to guarantee the flexibility and safety of rehabilitation training, the lack of full compliance rehabilitation training methods, and the lack of flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the accompanying drawings.
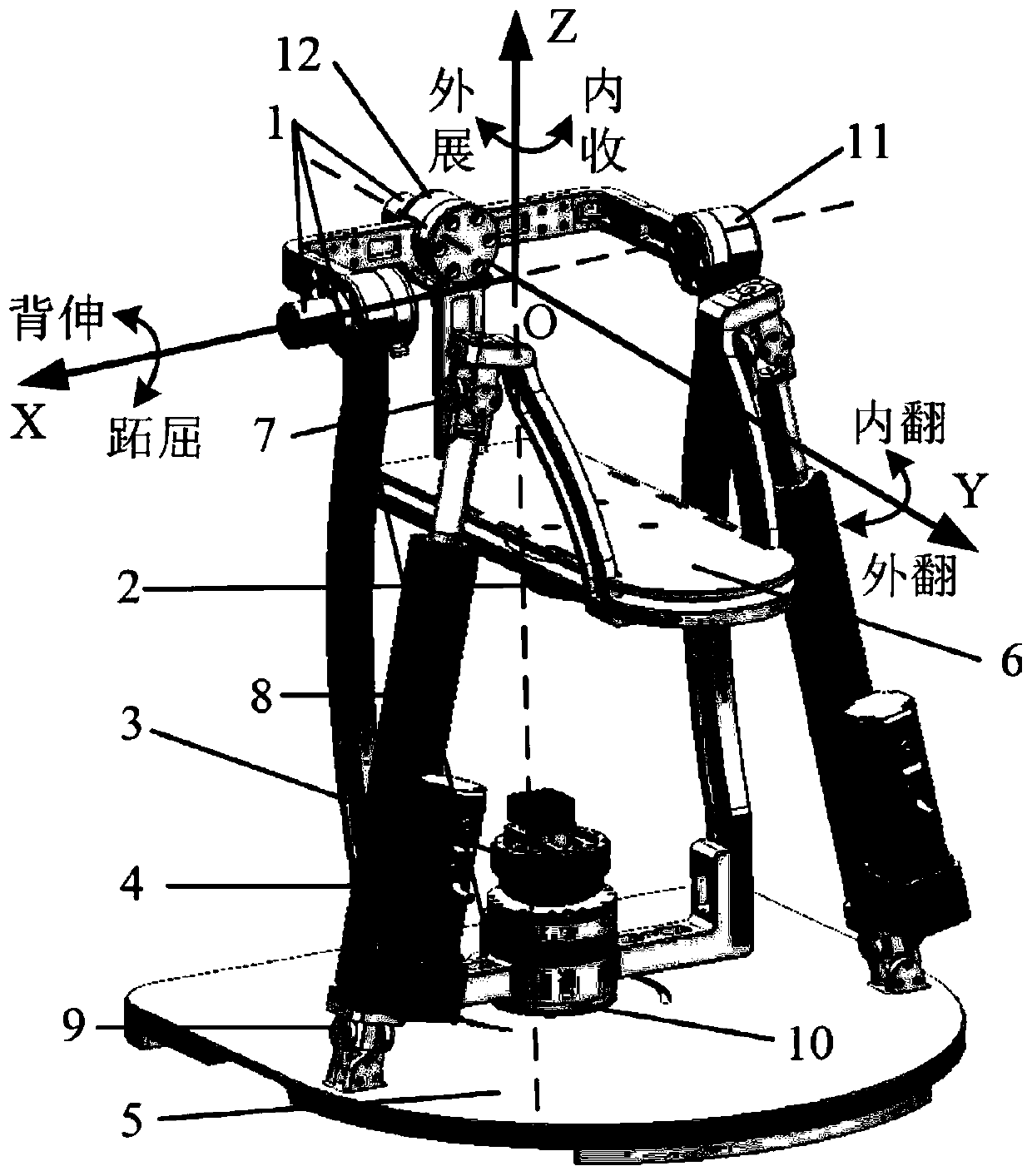
[0018] Servo motor used in the present invention drives parallel ankle rehabilitation robot as attached figure 1 shown, for 2-U P S / R RR parallel mechanism (wherein, U represents the Hooke pair, P represents the moving pair, S represents the spherical pair, R represents the rotating pair, and the underline represents the drive joint), including a base 5, a moving platform 6, and two UPS parallel branch chains (U is the Hooke pair 11, P is the moving pair 10, S is the spherical pair 9) and a series RRR constrained branch chain (rotating pairs 12, 13, 14, respectively). The dorsiflexion / plantarflexion and varus / valgus movements are driven by two servo electric push rods 4, and the adduction / abduction are driven by a servo motor 3. The running angle of the moving platform 6 is detected in real time ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More