

Intrinsic motivation based self-cognition system for motion balance robot and control method
A technology of cognitive system and control method, applied in the field of autonomous cognitive system and control of motion balance robot based on intrinsic motivation, can solve the problem that the research of motion balance bionic autonomous cognitive model is rare and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
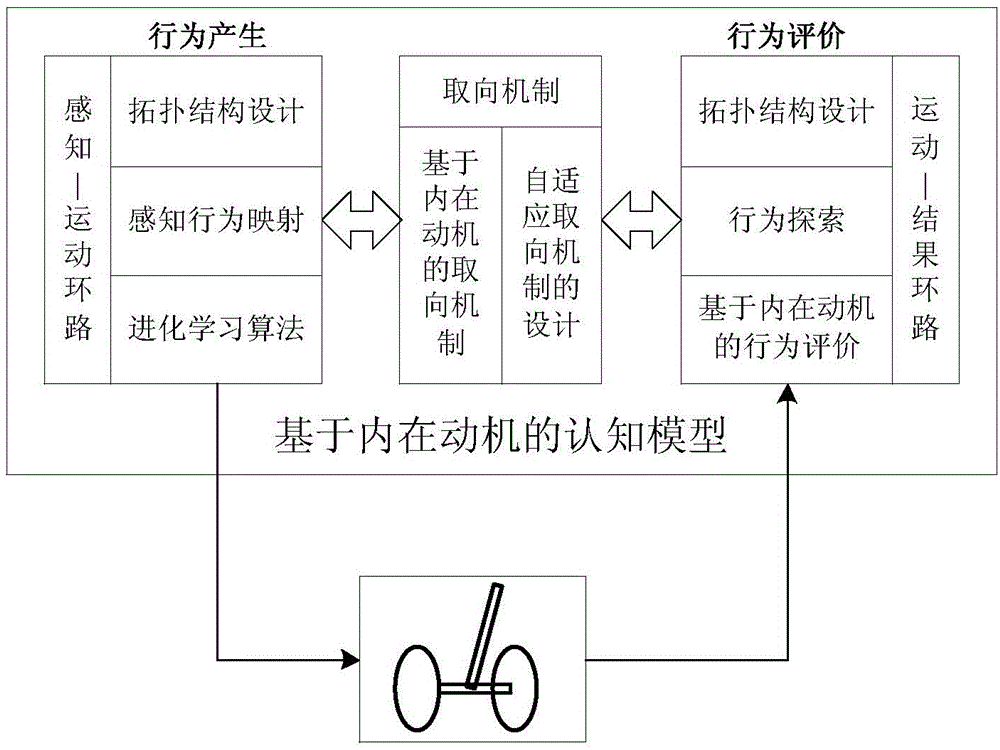
[0037] An autonomous cognition system for a motion balance robot based on intrinsic motivation, the system structure is as follows: figure 1 As shown, the autonomous cognitive system of the kinematic balance robot includes: a cognitive model based on intrinsic motivation, and the cognitive model based on intrinsic motivation is composed of behavior generation, behavior evaluation and orientation mechanisms.
[0038] Among them, the behavior generation is mainly the formation of the "perception-motor" loop in the cognitive system, including: topology design, perceptual behavior mapping, evolutionary learning algorithm, two parts of perceptual behavior mapping and topology design can be realized by neural network , the connection weight of the neural network is the synaptic connection weight.
[0039] Behavior evaluation is mainly the formation of the "movement-result" loop in the cognitive system, including: topology design, behavior exploration, and behavior evaluation based o...
Embodiment 2
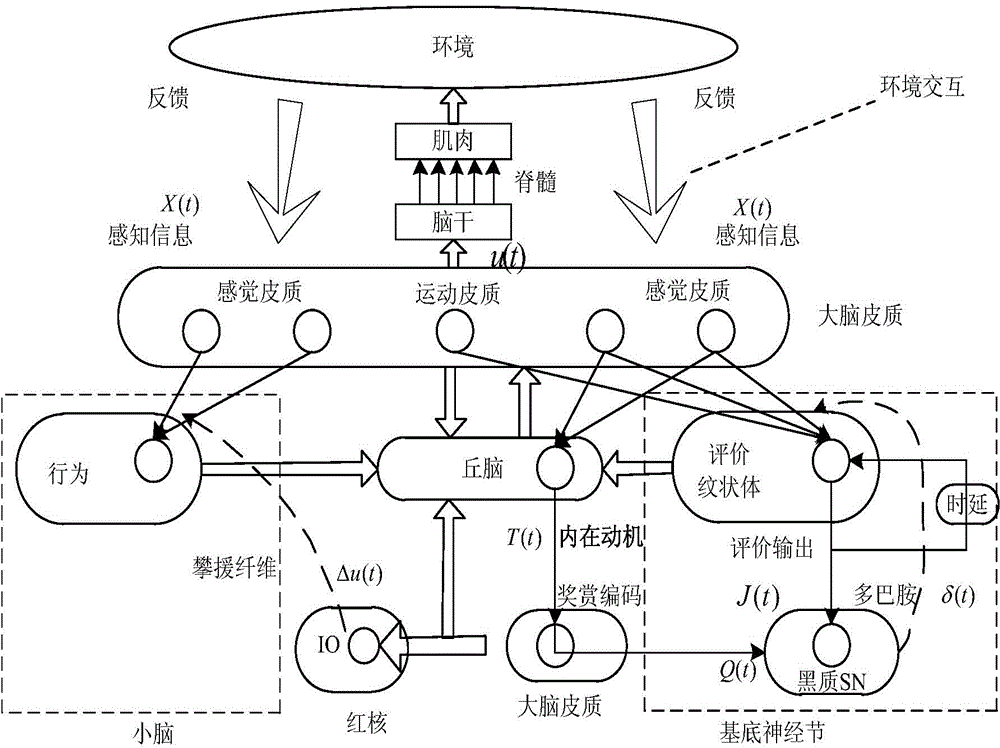
[0044] Behavior is output by the cortico-cerebellar system, and is projected to the cerebral cortex via the thalamus, and then transmitted to the muscles via the spinal cord to implement the behavior. The behavior output is U=CB(SC|S CC ), where CB() is the functional function of the cortico-cerebellar system, SC is the sensory cortical afferent, S CC For the cortex-cerebellum synaptic connection weight, use the MLP (multilayer perceptron) network to establish the cortex-cerebellum system, and its synaptic connection weight is expressed as W a ,V a , sensory cortical afferents as feedback system state X a , as shown in Figure 3(b), then:
[0045]
[0046] Among them, T means transpose; f a (z) represents the functional function from the hidden layer to the output in the cortical-cerebellar system network, and z is (V a ) T σ((W a ) T x a ); σ(h) represents the functional function input to the hidden layer in the cortical-cerebellar system network, h is (W a ) T x...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More