Water-washing control method of assistant washing robot for live water washing of transformer substation
A control method, water flushing technology, applied in the direction of electrical program control, digital control, etc., can solve problems such as the inability to ensure the smooth operation of the robot, the inability to ensure the accurate positioning of the start and end points of the flushing track, and the inability to monitor the position changes of the robot and the insulator in real time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention is described in detail below in conjunction with accompanying drawing:
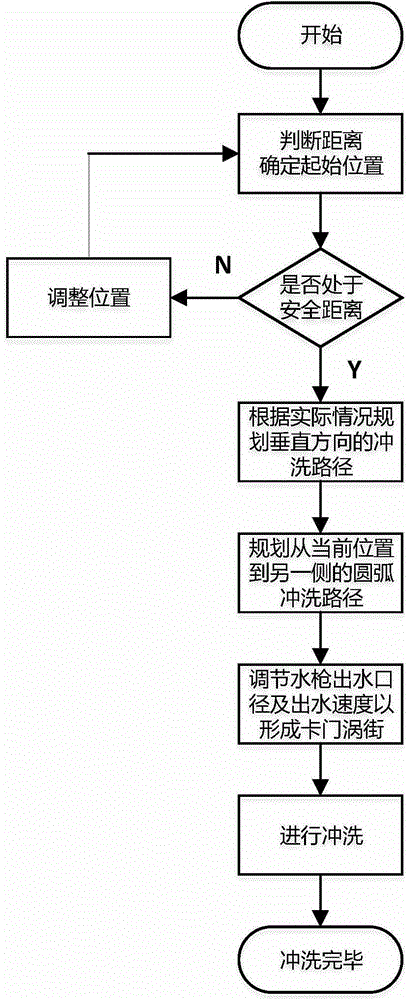
[0064] Such as Figure 1-3 As shown, a substation live water flushing auxiliary flushing robot water flushing control method specifically includes the following steps:
[0065] Step 1: Obtain the relative three-dimensional coordinate value between the current robot and the insulator according to the distance collected by the laser rangefinder installed on the gimbal and the surveillance camera and the monitored image, and judge whether the relative distance between the two is a safe distance. If so, go to the next step , if not, adjust the position of the gimbal until the relative distance is a safe distance; determine the initial state of path planning;
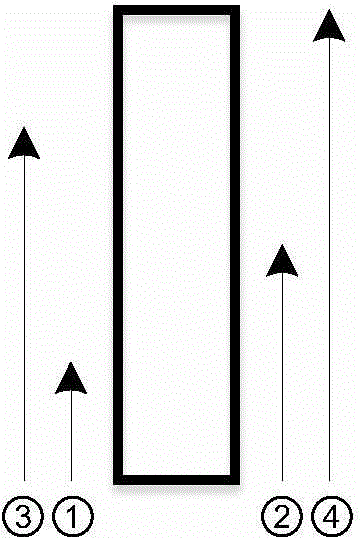
[0066] Step 2: Use the linear interpolation method to realize the automatic flushing of the vertical lifting mechanism for water flushing in the up and down direction of the insulator string;
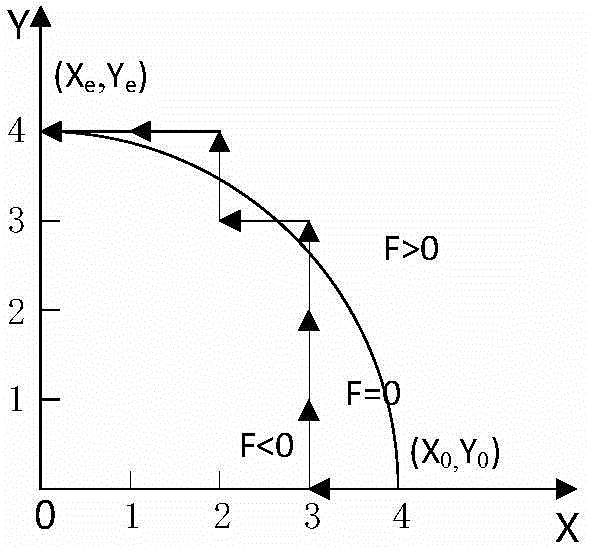
[0067] Step 3: Use the circu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More