

Water flushing control method of substation water flushing robot based on laser ranging
A technology of laser ranging and control method, applied in the field of robotics, can solve the problems of low automation level, inaccurate control, low cleaning quality, etc., and achieve the effect of improving quality and efficiency, improving flushing level, and improving flushing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention is described in detail below in conjunction with accompanying drawing:
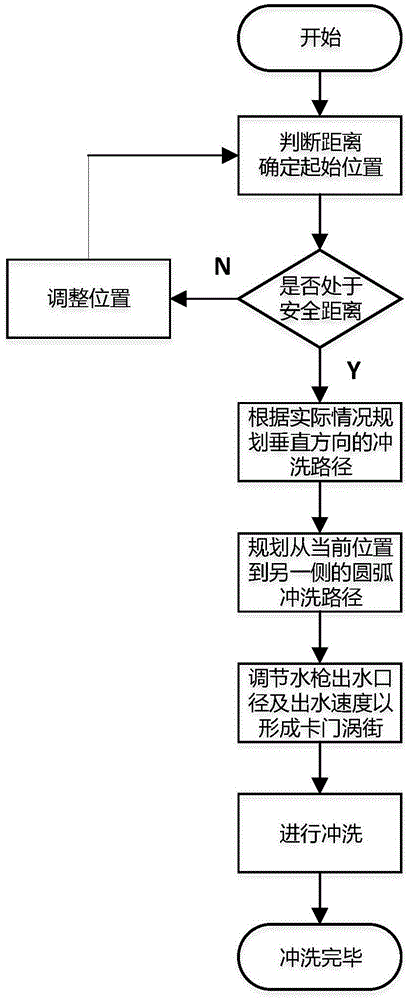
[0063] Such as Figure 1-3 As shown, the water flushing control method of the substation water flushing robot based on laser ranging includes the following steps:
[0064] Step 1: Establish the path planning model of the robot; the depth distance between the robot and the insulator can be obtained according to the laser rangefinder installed on the washing platform, and then image recognition is performed on the pictures obtained by the surveillance camera, so that the distance between the robot and the insulator can be obtained. At the same time, it can also judge the relative distance between the current robot and the insulator, ensure that the working distance is within the safe range, judge the position of the robot, and determine the initial state of the path planning;
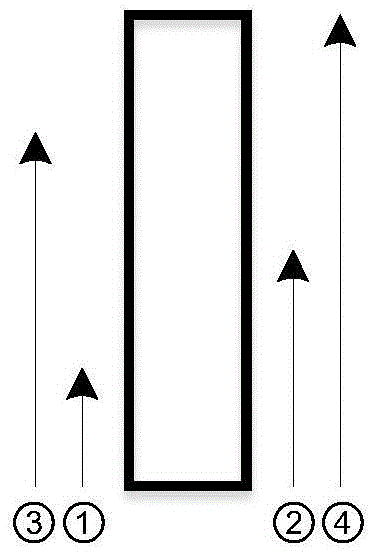
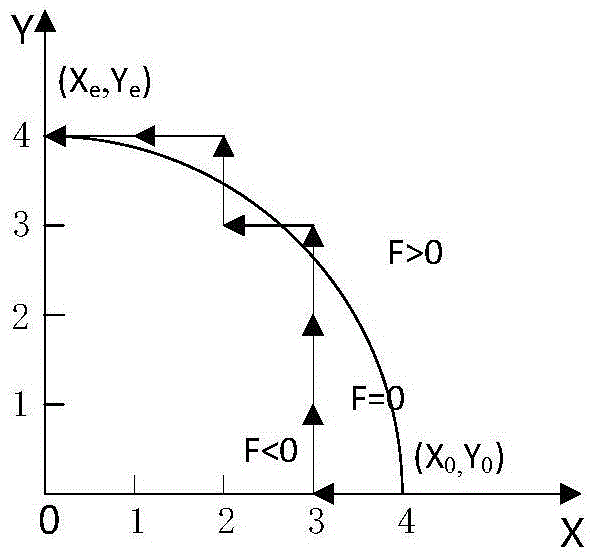
[0065] Step 2: Use the linear interpolation method to realize the automatic flushing of the insulator...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More