

Curtain wall cleaning robot using wall suction movement mechanism
A motion mechanism and wall surface technology, which is applied in the direction of window cleaning, application, cleaning equipment, etc., can solve the problems of limited obstacle surmounting ability, inability to move horizontally, and low cleaning efficiency, so as to solve the problem of poor obstacle surmounting ability, improve work efficiency, The effect of high structural utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
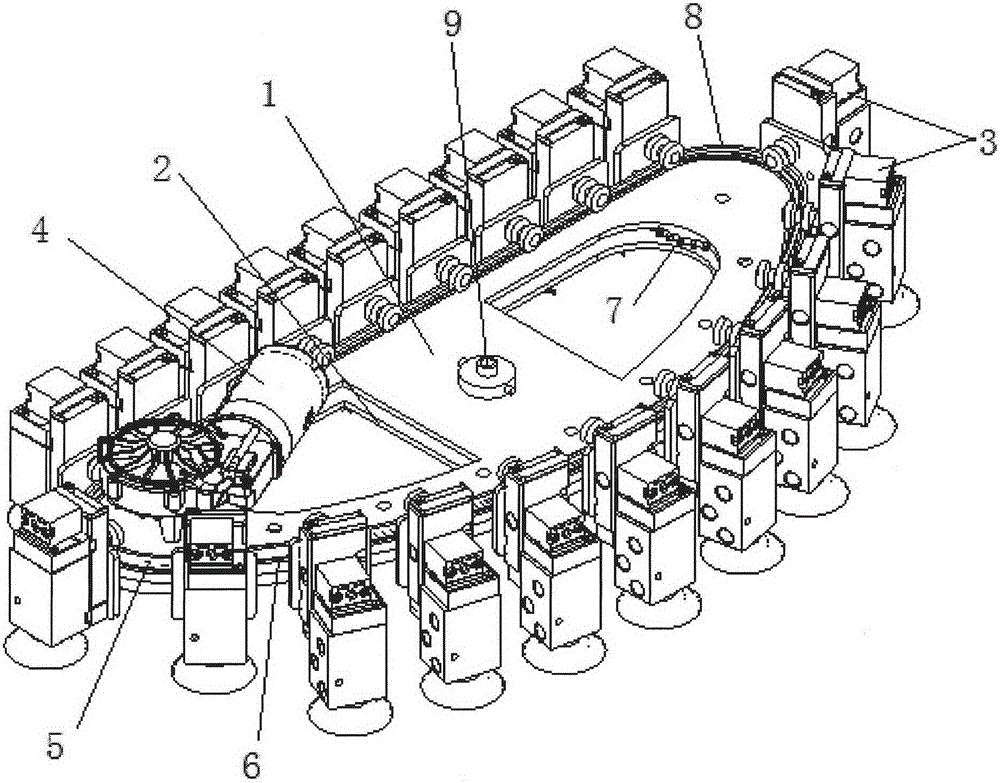
[0026] Such as figure 1 As shown, a wall adsorption motion mechanism of the present invention includes a D-shaped rotary motion mechanism, and the D-shaped rotary motion mechanism includes a D-shaped upper plate 1 and a D-shaped lower plate 2 connected together, and the D-shaped upper plate Plate 1 is provided with motor 4, is provided with driving wheel 5, driven wheel 7 and chain 6 between described D shape upper plate 1 and D shape lower plate 2, and described motor 4 drives driving wheel 5, and described driving wheel 5 The chain 6 drives the driven wheel 7 to rotate; the chain 6 is fixed with a plurality of vacuum adsorption movement feet 3, and the outer edges of the D-shaped upper plate 1 and the D-shaped lower plate 2 are respectively provided with a rotary guide rail 8, and the D-shaped The upper plate 1 is provided with a gas-electric rotary distribution mechanism 9;
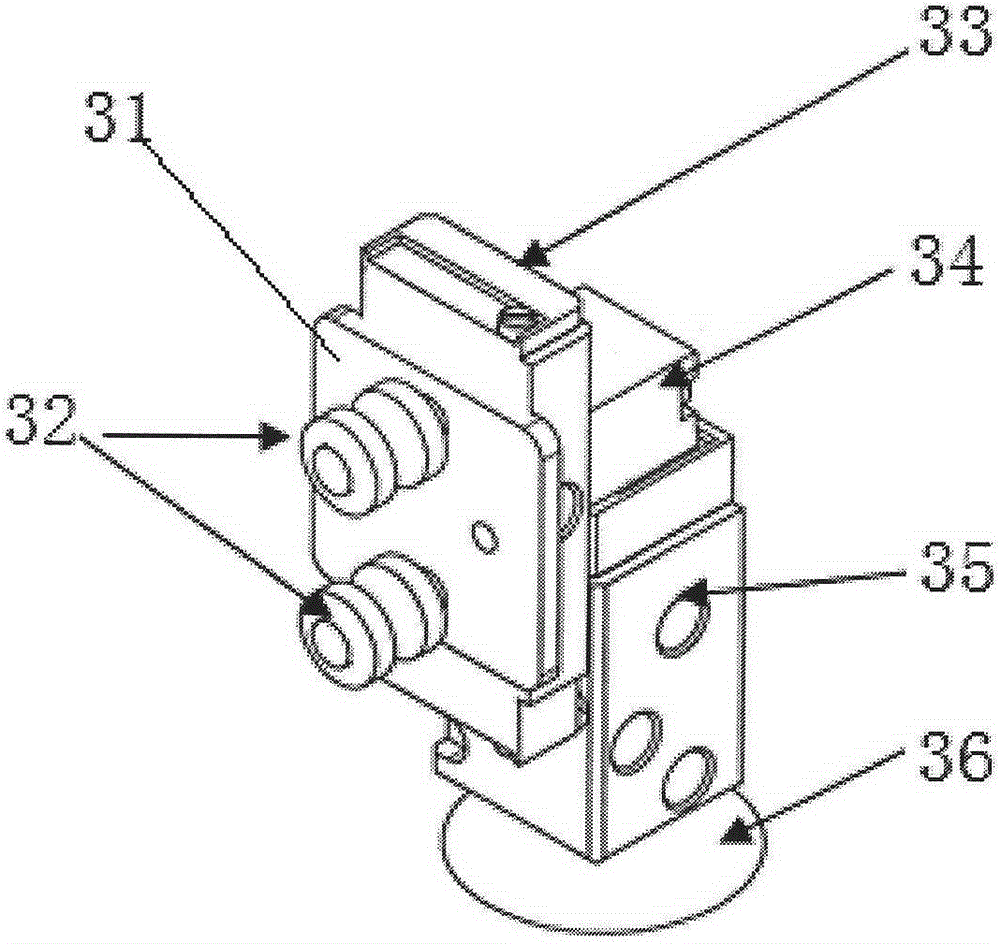
[0027] Such as figure 2 As shown, the vacuum adsorption movement foot 3 includes a fixed frame 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More