

Speed control method for inching operation of robot
A speed control and robot technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problem that high-speed jogging cannot stop smoothly in time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with the accompanying drawings.
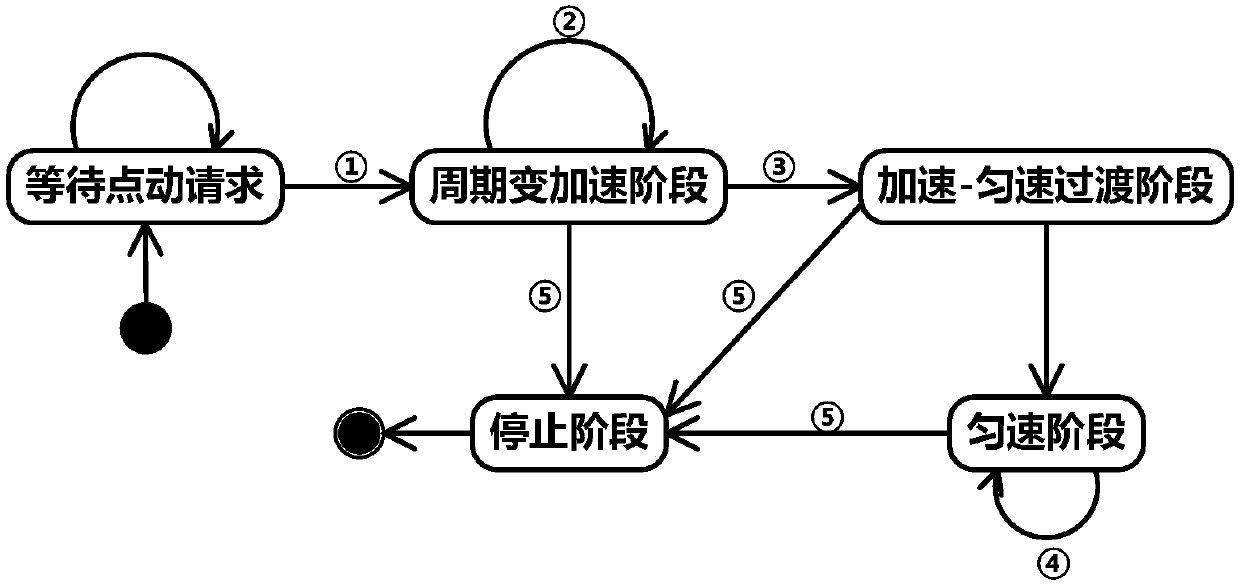
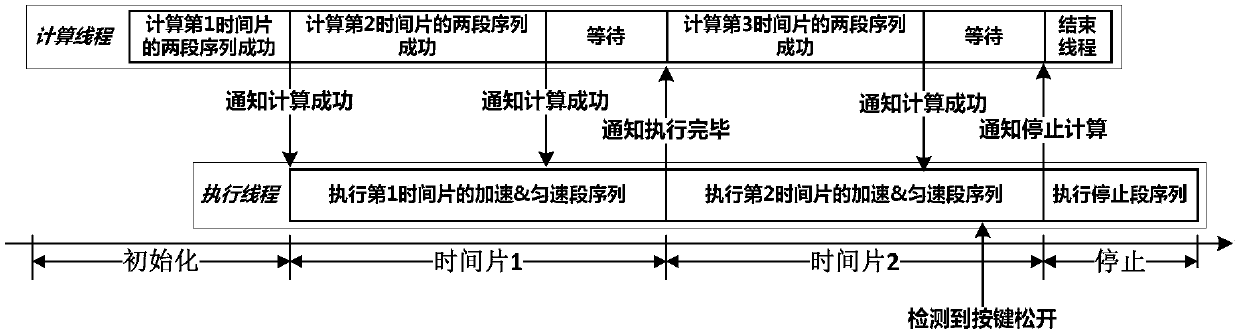
[0060] The key to the implementation of the invention lies in the synchronous management of the calculation thread and the execution thread of the robot jogging interpolation sequence by the control program. When the controller receives the jog request signal, the program successively starts the calculation thread and execution stroke of the interpolation sequence; after cyclically calculating and executing several interpolation sequences of acceleration & constant speed time slices, when it is detected that the user actively stops the jog (release the button) or there is an unreachable point in the robot movement (beyond the reachable range of the robot or a collision will occur), execute the stop segment sequence, log off the calculation process and execution thread in turn, and wait for the next jog request. The length of the time slice is fixed for the program, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More