

Swing welding track planning method of welding robot
A welding robot and trajectory planning technology, applied in welding equipment, welding equipment, auxiliary welding equipment, etc., can solve the problems of limited swing range, increased difficulty of solving, and inapplicability, so as to ensure uniformity and reliability of welding performance, good versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
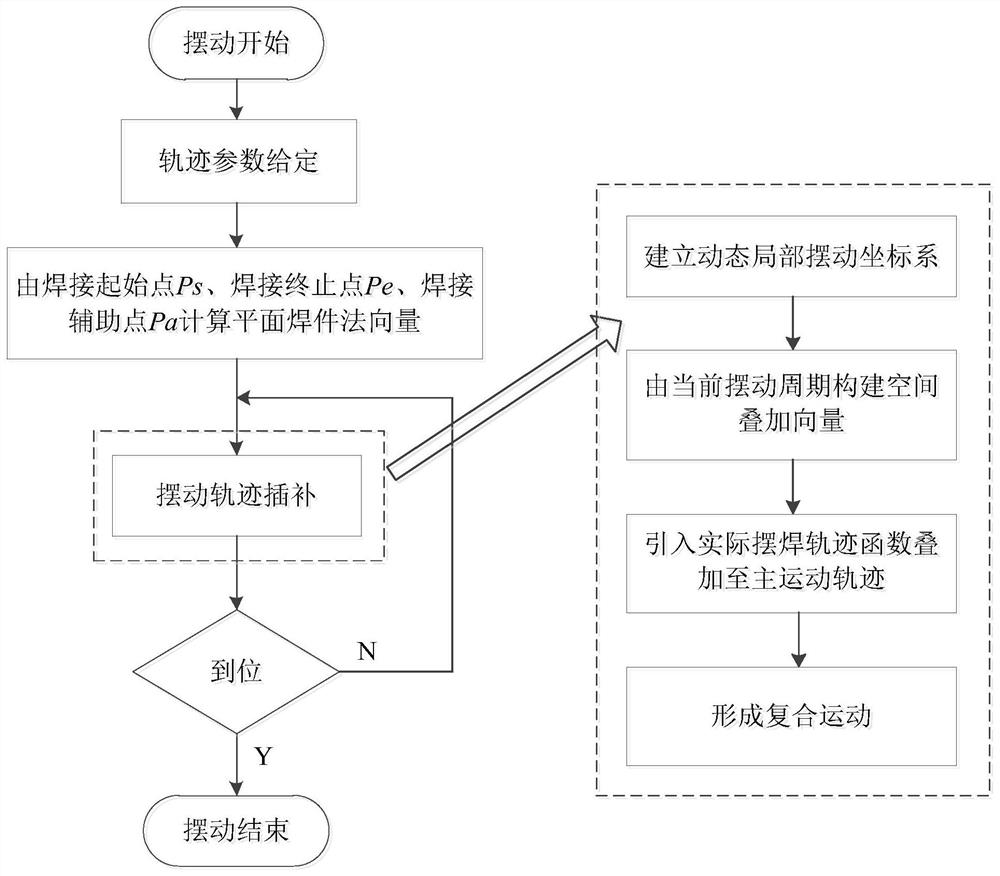
Method used
Image

Examples
Embodiment Construction
[0033] The content of the present invention will be further described in detail below in conjunction with specific embodiments.
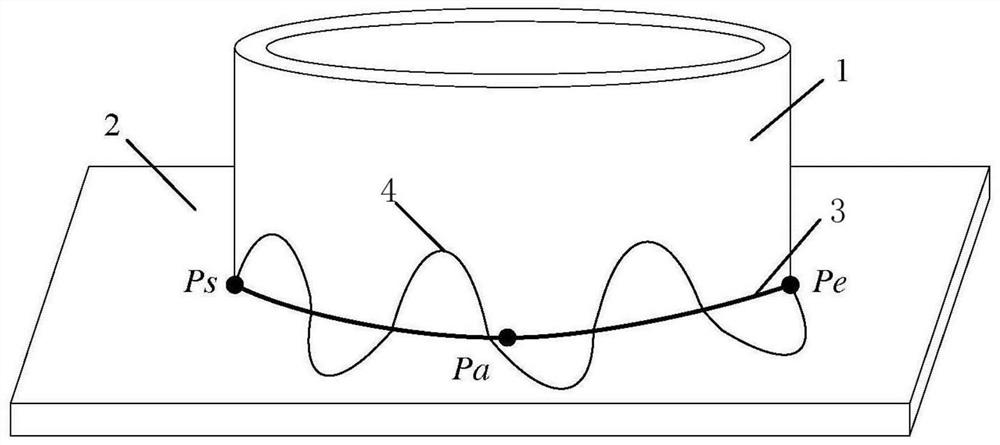
[0034] like figure 2 As shown, weldment 1 is a curved surface weldment, weldment 2 is a flat weldment, P s is the starting point of welding, P a is the welding auxiliary point, P e The three points are not collinear.
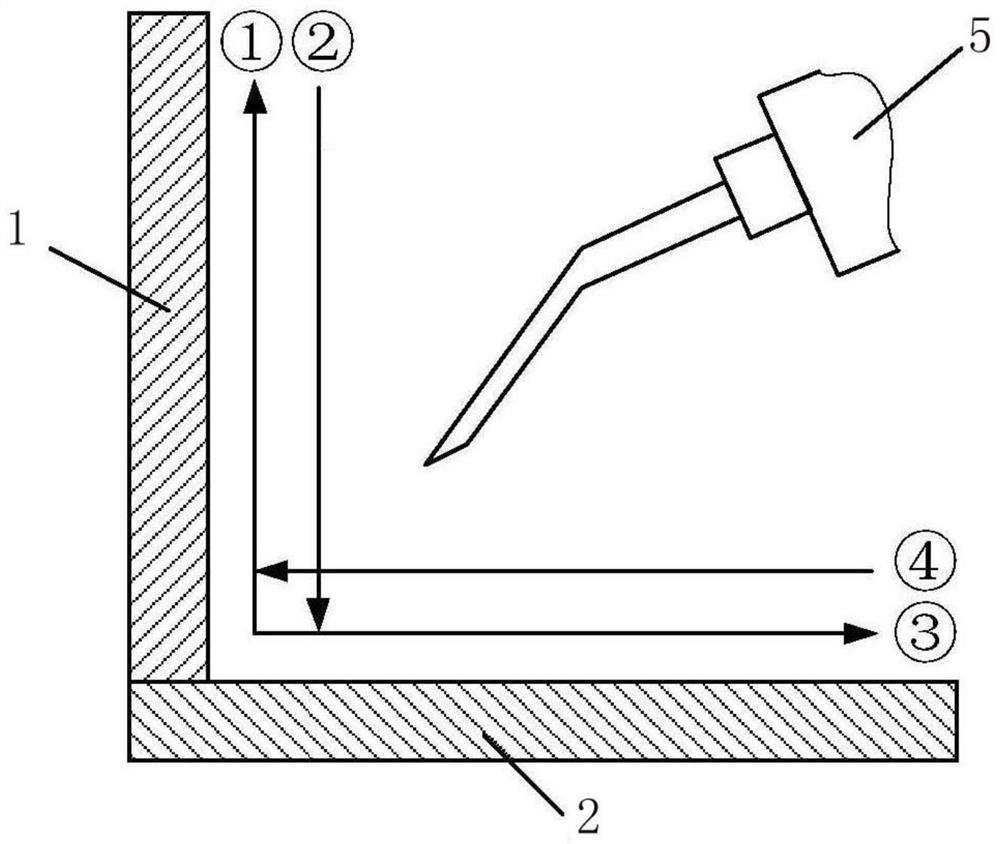
[0035] like image 3 As shown, in the section formed by the curved surface weldment (weldment 1) and the flat weldment (weldment 2), the welding gun 5 at the end of the robot reciprocates and alternately swings between the weldments in an "L"-shaped motion, as shown in the figure The serial number ①②③④ indicates the sequence of the weaving welding path. During the welding process, the welding torch is always attached to the surface of the weldment.
[0036] Since the robot controllers of most brands can realize the space arc trajectory interpolation, in this embodiment, the weldment 1 is a cylindrical weldment, and the weld curv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More