

Motion control method and system of robot
A motion control system and motion control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of difficulty in learning and operation, difficulty in teaching and learning, and inconvenient operation, so as to achieve simple and convenient teaching, Improve teaching efficiency and facilitate teaching operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other implementations obtained by persons of ordinary skill in the art without making creative efforts fall within the protection scope of the present invention.
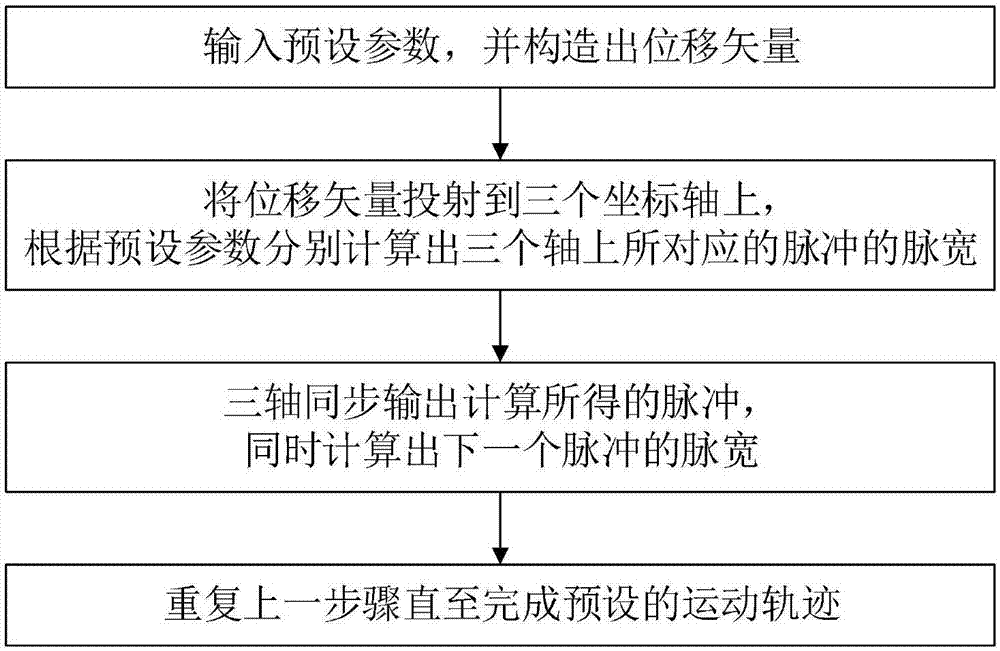
[0050] like figure 1 As shown, the present invention provides the motion control method of robot, comprises the following steps:
[0051] S1: Input preset parameters and construct a displacement vector;
[0052] S2: Project the displacement vector onto the three coordinate axes, and calculate the pulse widths of the corresponding pulses on the three axes according to the preset parameters;
[0053] S3: Three-axis synchronously output the calculated pulse, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More