

Indoor track type intelligent patrolling robot system based on combined track
A robot system and intelligent inspection technology, applied in the field of robots, can solve the problems of electromagnetic shielding windows not being dust-proof, indoor equipment inspection time is long, and equipment service life is shortened, so as to achieve system construction and long-term continuous inspection. The effect of checking work and materials is easy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
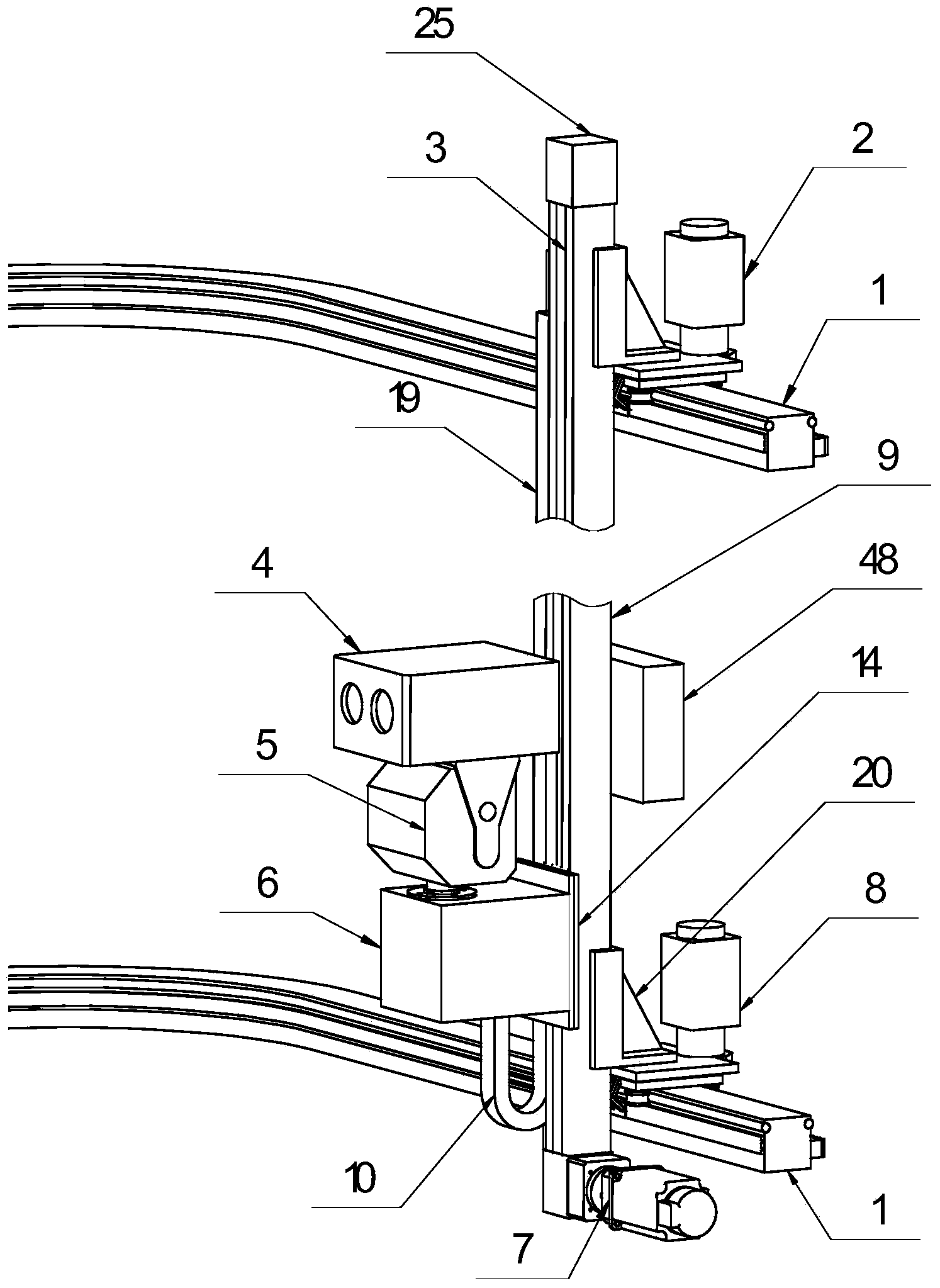
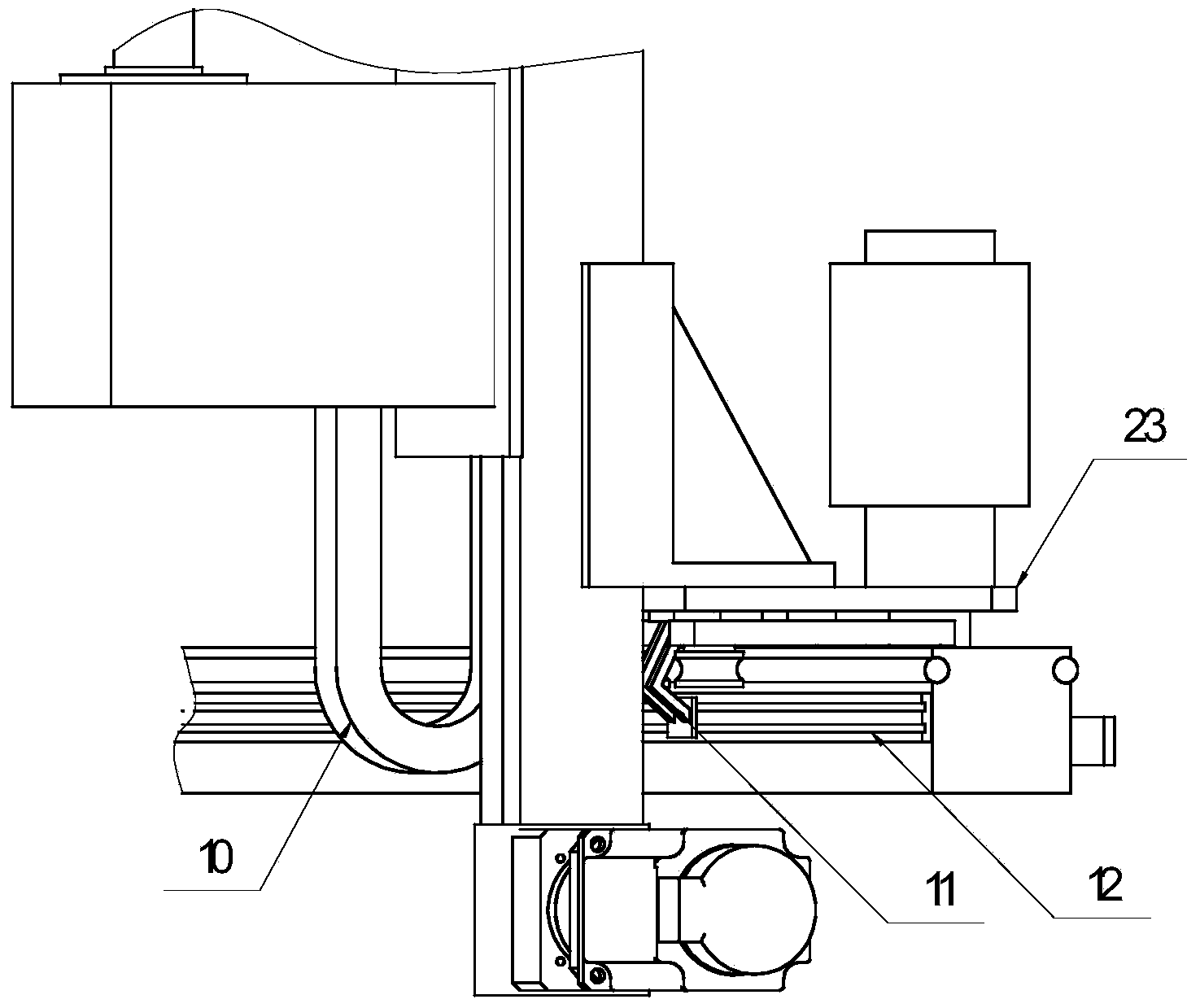
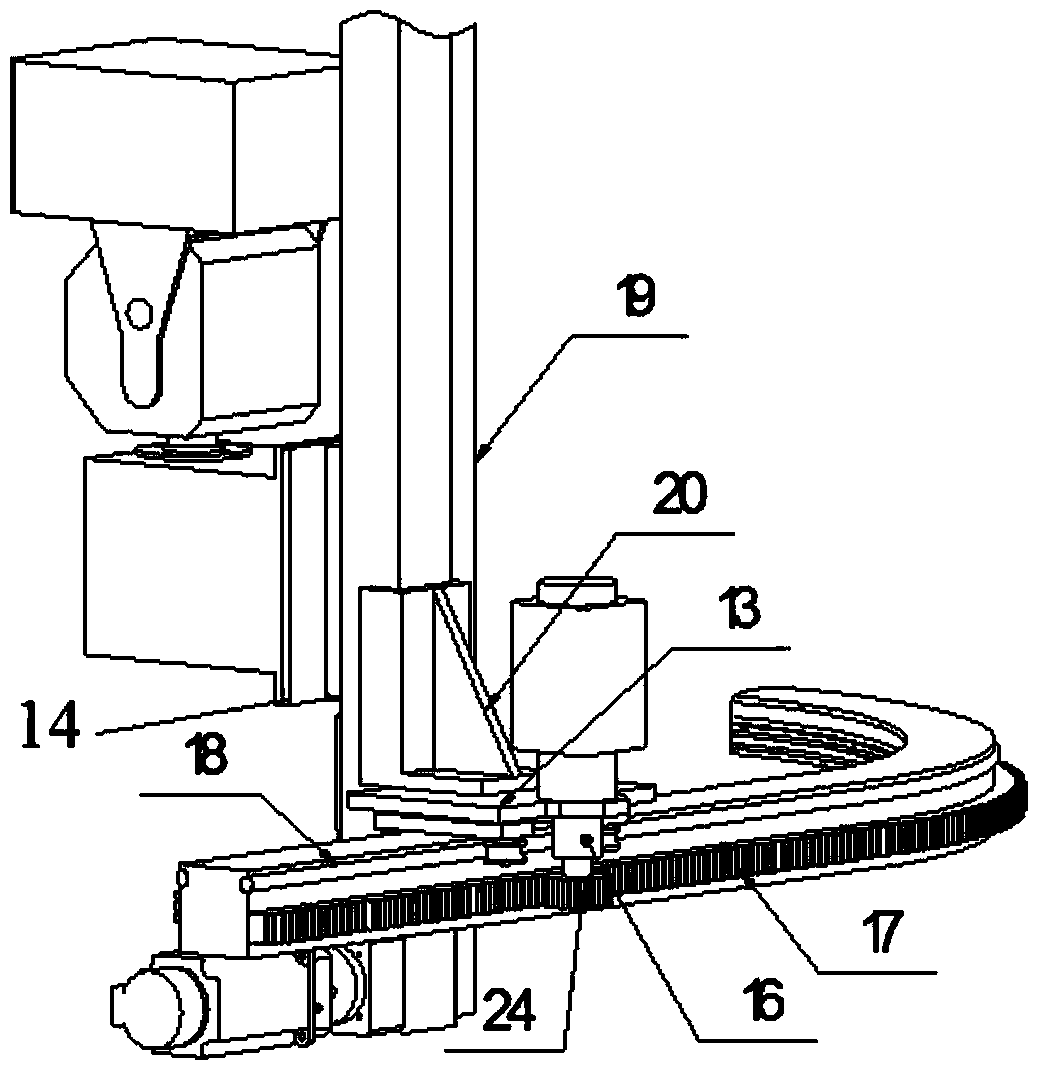
[0076] Such as Figure 1-4 Shown, the main body of the present invention is made up of two parallel horizontal turning tracks 1, a vertical track 9, a steerable mobile platform system 23, a sliding seat 14 and a motion track system composed of a seat type control box 6, a cloud platform 5 and a detection The detection system composed of components 4 is composed.
[0077] Wherein, the horizontal turning track 1 is divided into upper and lower two, which are continuously connected by a straight line part and a turning part. The distance between the upper and lower two depends on the requirements of the detection range, which can range from 1 meter to 10 meters. A trolley line 12, two left and right guide columns 18 and a tooth bar 17 are installed on the horizontal turning track 1. The front and rear two groups of pulley blocks 15 that can turn to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More