

Foot device used for wearable lower limb exoskeleton robot
An exoskeleton robot and wearable technology, which is applied in the fields of appliances that can be operated by the disabled, medical science, prostheses, etc. Coupling, many degrees of freedom of movement, and the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
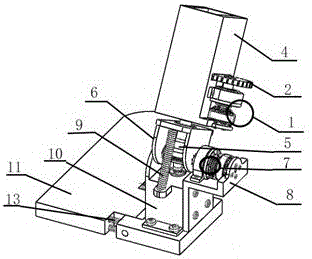
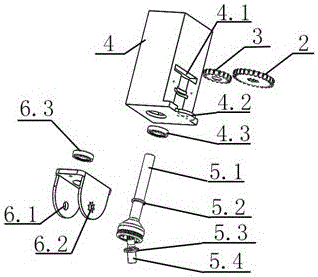
[0021] please see figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 , a foot device for a wearable lower extremity exoskeleton robot provided by the present invention, including a first actuator 1 for controlling the internal / external rotation of the ankle joint, a driving gear mechanism 2, a driven gear mechanism 3, and a lower leg link 4. Ball cage type universal joint 5. Rotation adjustment device 6. Second actuator for controlling ankle plantarflexion / dorsiflexion 7. Motor fixing support plate 8. First return spring 9. Ankle joint control boar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More