

Servo system adaptive sliding mode control method based on extended-state observer
A technology of adaptive sliding mode and servo system, which is applied in the direction of adaptive control, general control system, control/adjustment system, etc., and can solve problems such as chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The present invention will be further described below in conjunction with the accompanying drawings.
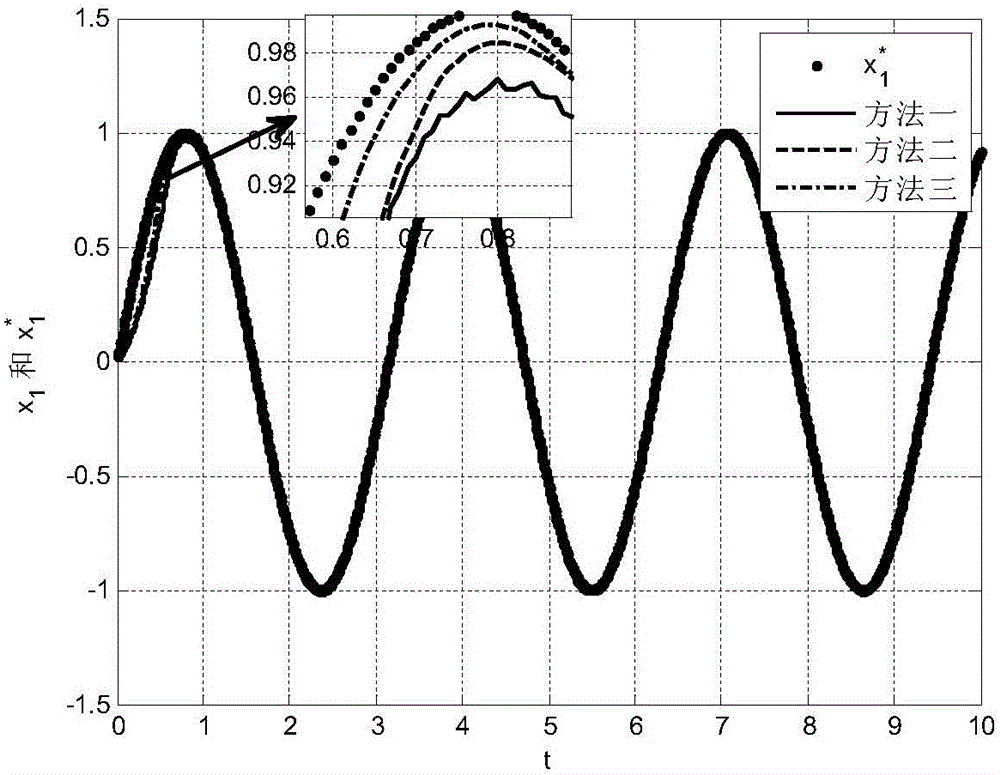
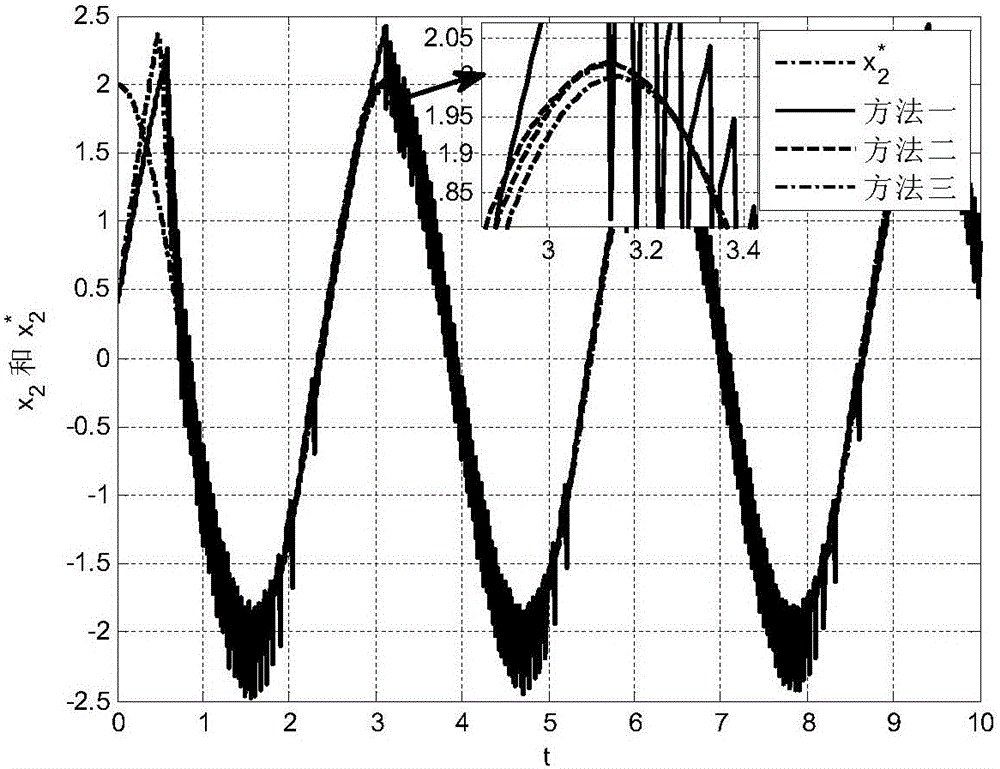
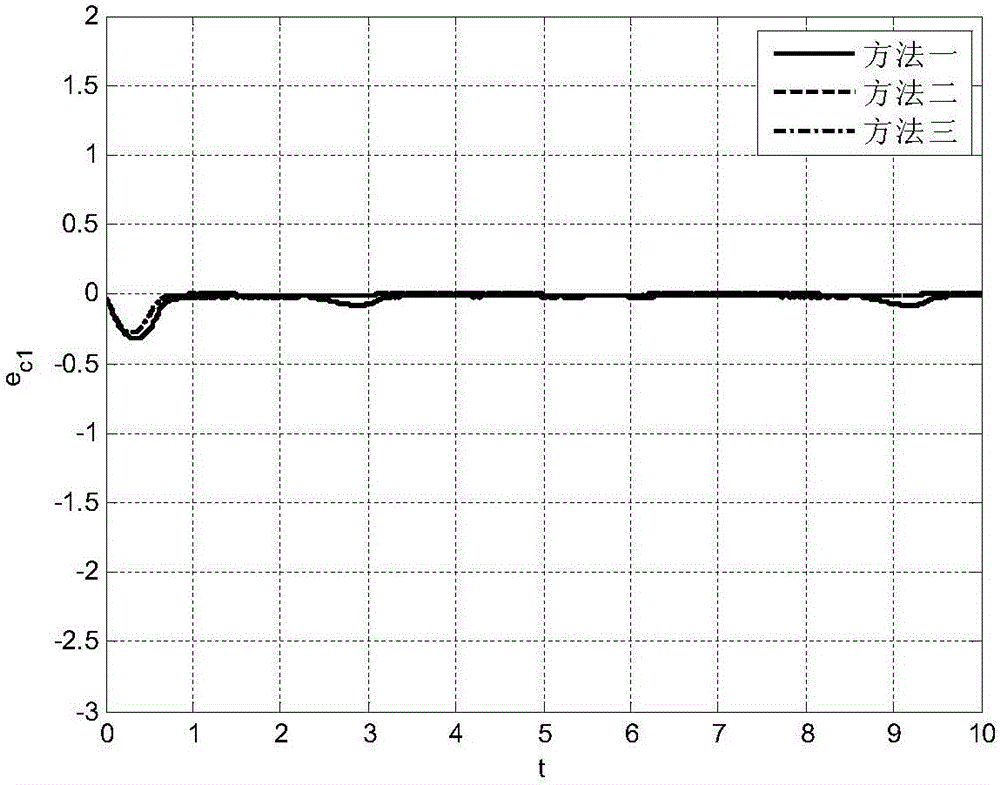
[0090] Referring to Figure 1- Figure 9 , an adaptive sliding mode control method for servo systems based on extended state observers, including the following steps:
[0091] Step 1, establish the servo system model shown in formula (1), initialize the system state and control parameters;
[0092]
[0093] Among them, θ m , are the state variables, representing the position and speed of the motor output shaft respectively; J and D are the equivalent moment of inertia and equivalent damping coefficient converted to the motor shaft; K t is the motor torque constant; v(u) is the control variable with saturation limit, v max is the maximum output that the actuator can output, u is the output of the controller; T is the load friction torque converted to the motor shaft and the disturbance part of the friction;
[0094] Step 2, performing approximate processing on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More